
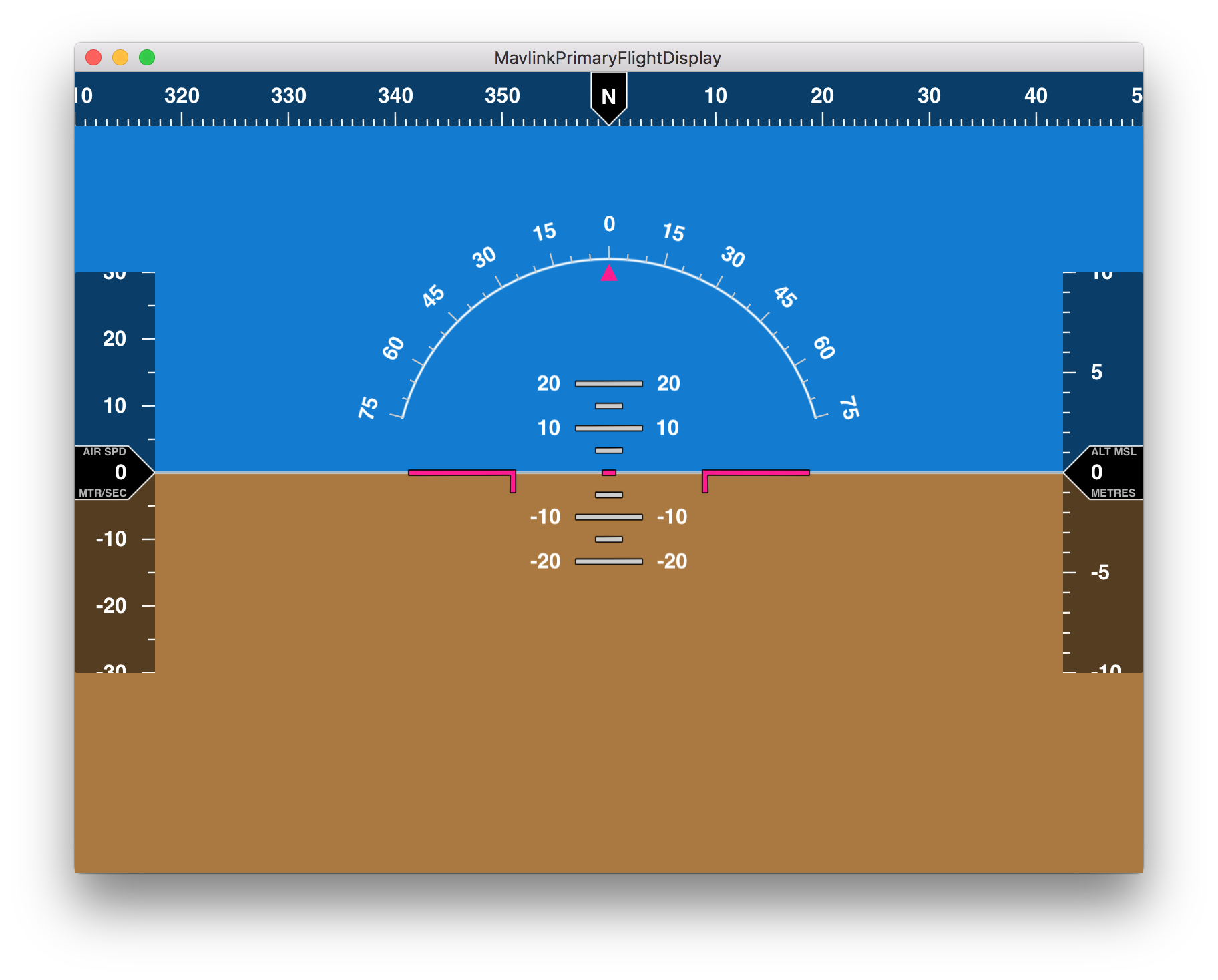
MavlinkPrimaryFlightDisplay is a Mac + iOS app which demonstrates how to integrate the PrimaryFlightDisplay framework for a MAVLink speaking autopilot.
The demo app is useful as a learning tool in several other ways as it also demonstrates how to:
- connect to Pixhawk over USB, Bluetooth, and 3DR radio telemetry
- decode MAVLink attitude, heading, airspeed, and altitude messages
- send decoded data to the primary flight display for real time updates
- customize the display style of the primary flight display
Follow these steps after cloning the repository to get the Mac app running.
Initialize and update git submodules.
git submodule update --init
Build the framework dependencies.
carthage bootstrap --platform Mac
If you don't have the Carthage dependency manager it can be installed with Homebrew.
brew install carthage
Using Xcode 7.3+ select either the Mac or iOS target then build and run.
Use the Mavlink menu in the running Mac application to choose which serial port to connect to.
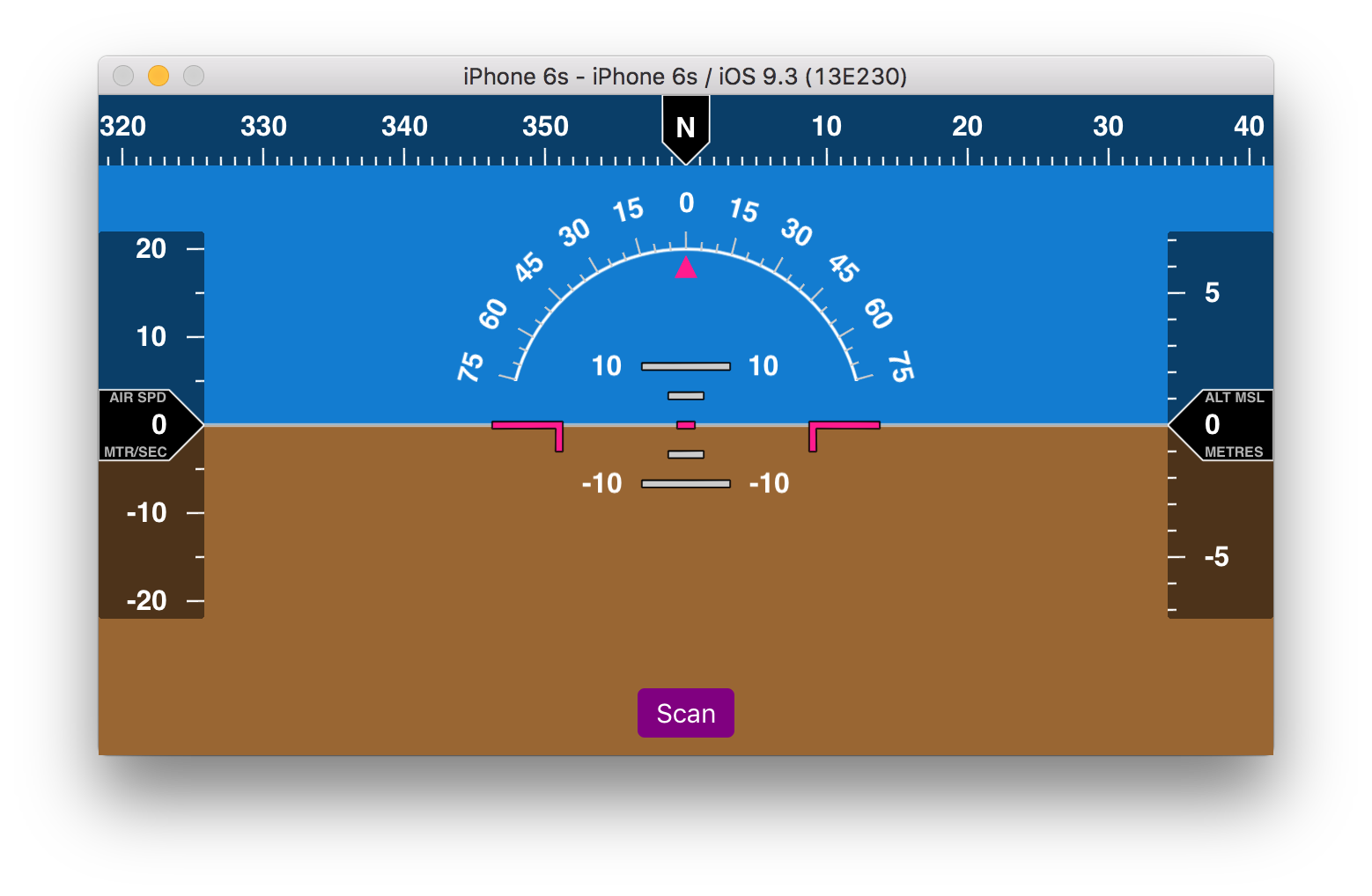
Use the scan button to connect to the Readbear BLE mini. Please read my article MAVLink Radio Telemetry for iOS to configure a ground-based radio station for use with iOS devices.
The sample project is only tested with an authentic 3DR Pixhawk running PX4 firmware.
Communication with 3DR bluetooth and radio telemetry requires a connection to telemetry port 1.
Pull requests are welcome on the master branch.