#Finding Lane Lines on the Road
Driving lane lines detection using OpenCV. Following techniques are used:
- Canny Edge Detection
- Color Selection
- Region of Interest Selection
- Gaussian blur
##1. Description of pipelines
My pipeline consisted of 6 steps.
- Extract only yellow and white portions from the image by using
cv2.inRange because I assume all lane markers are yellow or white.
After the color selection, my image looks like this:

2. Gaussian-blur the image using filter size 5. It helps smoothing out some edges and removes some noises

3. Extract edges using the [Canny algorithm](http://docs.opencv.org/2.4/modules/imgproc/doc/feature_detection.html?highlight=canny#canny86).
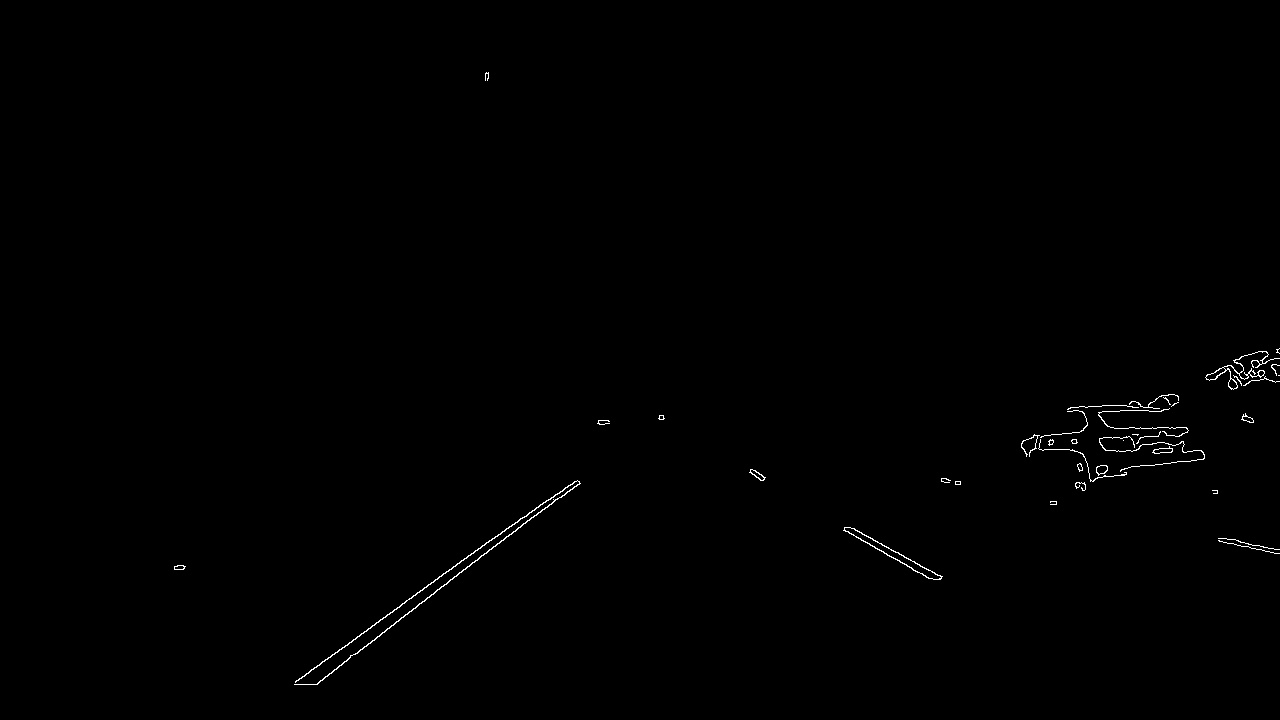
4. Crop and focus only the region of interest. Assuming the camera is attached to the fixed position, I can remove outside of my ROI.
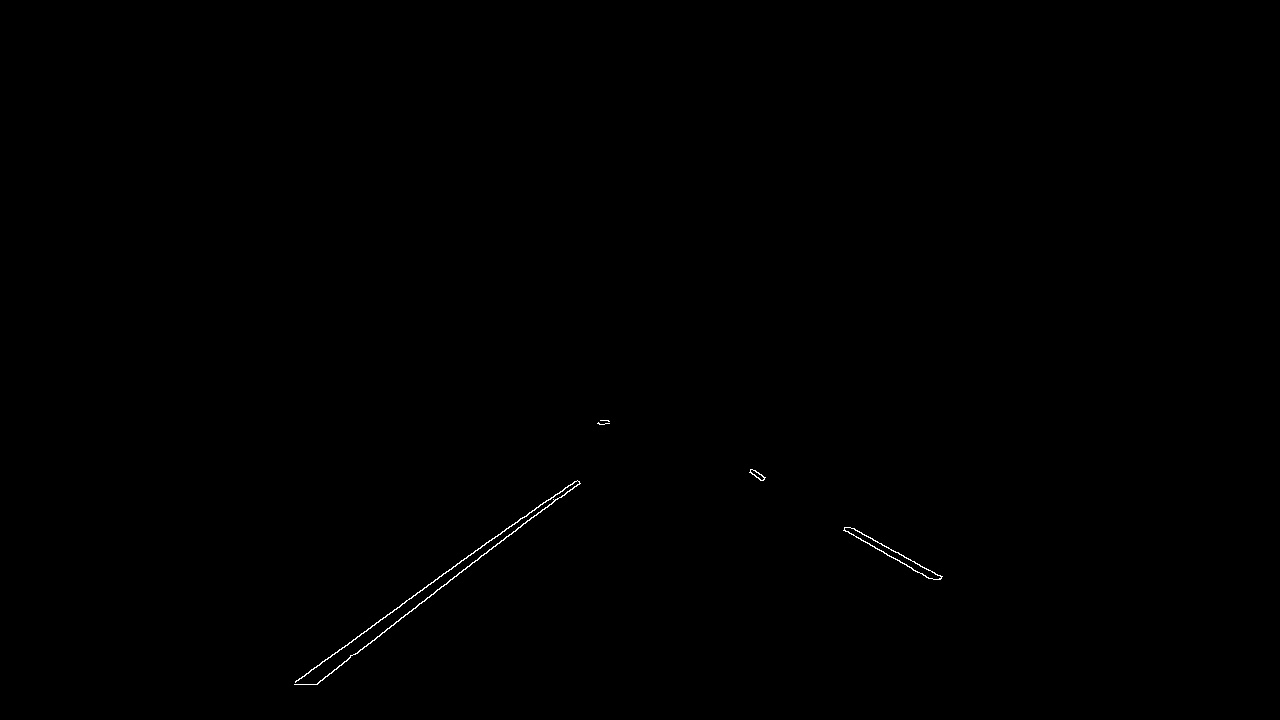
5. Most of the visible parts are now line segments with some noises. **I also want to draw two long lines not multiple line segments**. In order to achieve that, I created a new function called
`draw_avg_lines(img, lines, color=[255, 0, 0], thickness=2, info=dict())`
- Created a dictionary called `info`
- It holds information about the latest 100 line segments
- Even if no lane is detected, it detects the lanes using the previous information
- Divide the `lines` input (from Hough Line Transform) into **two sub-lists** by computing the slope of each line segments
- *if the slope is negative, it must be part of the left line of the image*
- why? because the image is in perspective. The smaller object it is, the further it is
- why? because y-axis is inverted in OpenCV
- (0,0) coordinate is upper left corner
- (MAX\_WIDTH, MAX\_HEIGHT) is bottom right corner
- I compute **median slopes** for left and right lines
- I used **median** because there are some *outliers(false detection)*
- Now if I know the slope and points. I can draw lines as below
- I actually filled up the region in green to make it more visible
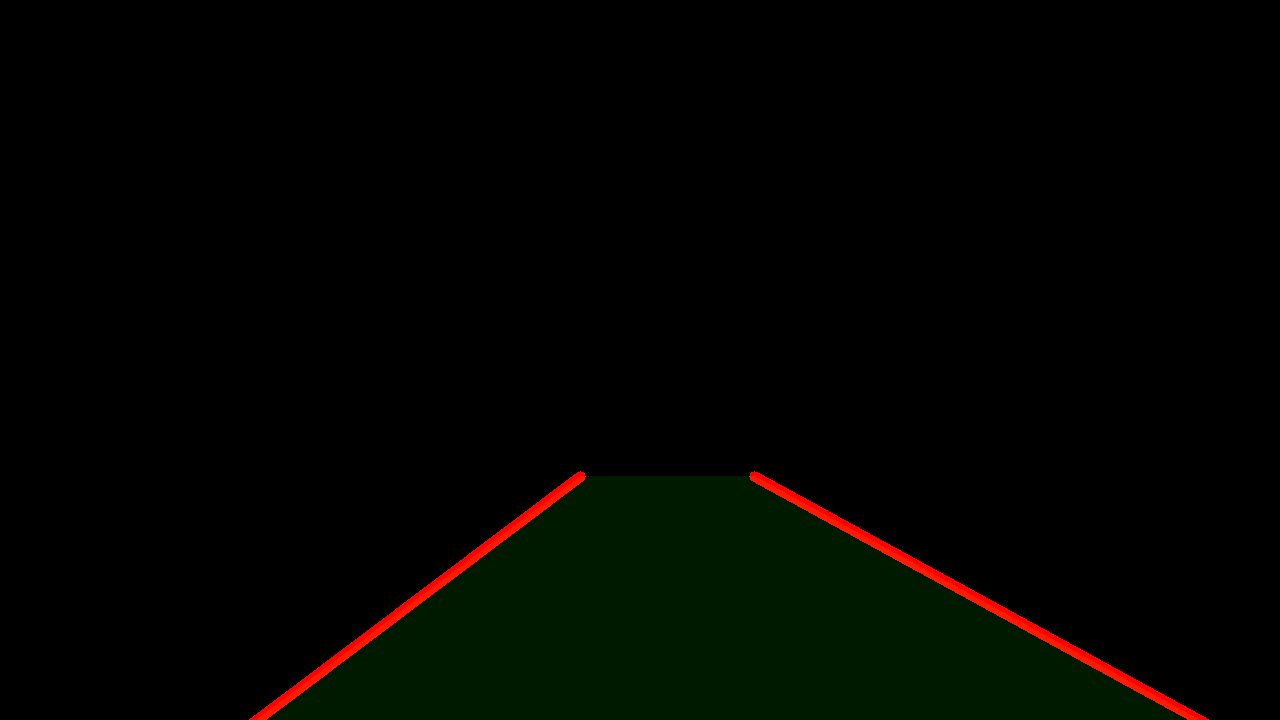
6. Combine the detected line image and the original image

##2. Potential shortcomings
- It assumes the lane marker colors are yellow and white. But for some reason if its lane markers are not yellow nor white, it won't able to recognize the lane
- It's drawing two straight lines. Therefore, it seems a bit off-lane when there is a curve
##3. Possible improvements
- By drawing a curve (instead of a line), it can detect lane more smoothly
- Instead of using median and running average, there should be a better way to detect lanes in a noiseless way by optimizing hyperparameters





