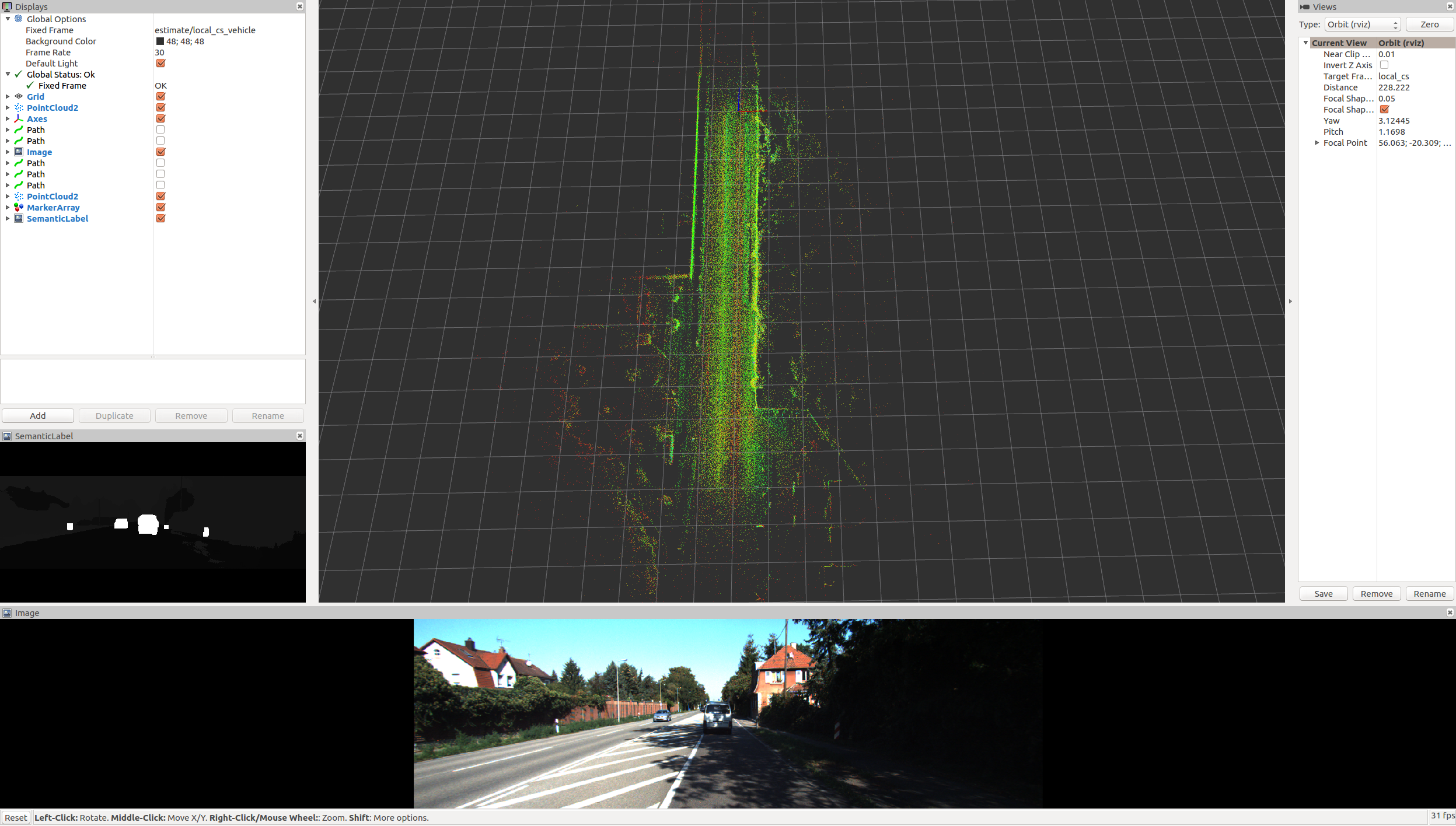
Lidar-Monocular Visual Odometry. This library is designed to be an open platform for visual odometry algortihm development. We focus explicitely on the simple integration of the following key methodologies:
- Keyframe selection
- Landmark selection
- Prior estimation
- Depth integration from different sensors.
- Scale integration by groundplane constraint.
This work was accepted on IROS 2018. See https://arxiv.org/pdf/1807.07524.pdf .
If you refer to this work please cite:
@inproceedings{graeter2018limo,
title={LIMO: Lidar-Monocular Visual Odometry},
author={Graeter, Johannes and Wilczynski, Alexander and Lauer, Martin},
booktitle={2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
pages={7872--7879},
year={2018},
organization={IEEE}
}
Please note that Limo2 differs from the publication. We enhanced the speed a little and added additional groundplane reconstruction for pure monocular visual odometry and a combination of scale from LIDAR and the groundplane (best performing on KITTI). For information on Limo2, please see my dissertation https://books.google.de/books?hl=en&lr=&id=cZW8DwAAQBAJ&oi .
mkdir -p ~/limo_odom_ws/src
cd src
git clone --rescursive https://github.com/kinggreat24/limo_kitti.git
catkin_make -j4-
Using rosbags
-
get test data Sequence 04 or Sequence 01. This is a bag file generated from Kitti sequence 04 with added semantic labels.
-
run
roslaunch demo_keyframe_bundle_adjustment_meta kitti_standalone_rosbag.launch
-
-
Using KITTI raw files
roslaunch demo_keyframe_bundle_adjustment_meta kitti_standalone_file.launch sequence_num:=0
The kitti_helper.cpp will read raw data from files and publish it via rostopic.

- Publish the corresponding TF information