This template will get you set up using ROS2 with VSCode as your IDE.
See how I develop with vscode and ros2 for a more in-depth look on how to use this workspace.
ROS2-approved formatters are included in the IDE.
- c++ uncrustify; config from
ament_uncrustify - python autopep8; vscode settings consistent with the style guide
There are many pre-defined tasks, see .vscode/tasks.json for a complete listing. Feel free to adjust them to suit your needs.
Take a look at how I develop using tasks for an idea on how I use tasks in my development.
This template sets up debugging for python files and gdb for cpp programs. See .vscode/launch.json for configuration details.
The template also comes with basic continuous integration set up. See .github/workflows/ros.yaml.
To remove a linter just delete it's name from this line:
matrix:
linter: [cppcheck, cpplint, uncrustify, lint_cmake, xmllint, flake8, pep257]You should already have Docker and VSCode with the remote containers plugin installed on your system.
Now that you've cloned your repo onto your computer, you can open it in VSCode (File->Open Folder).
When you open it for the first time, you should see a little popup that asks you if you would like to open it in a container. Say yes!
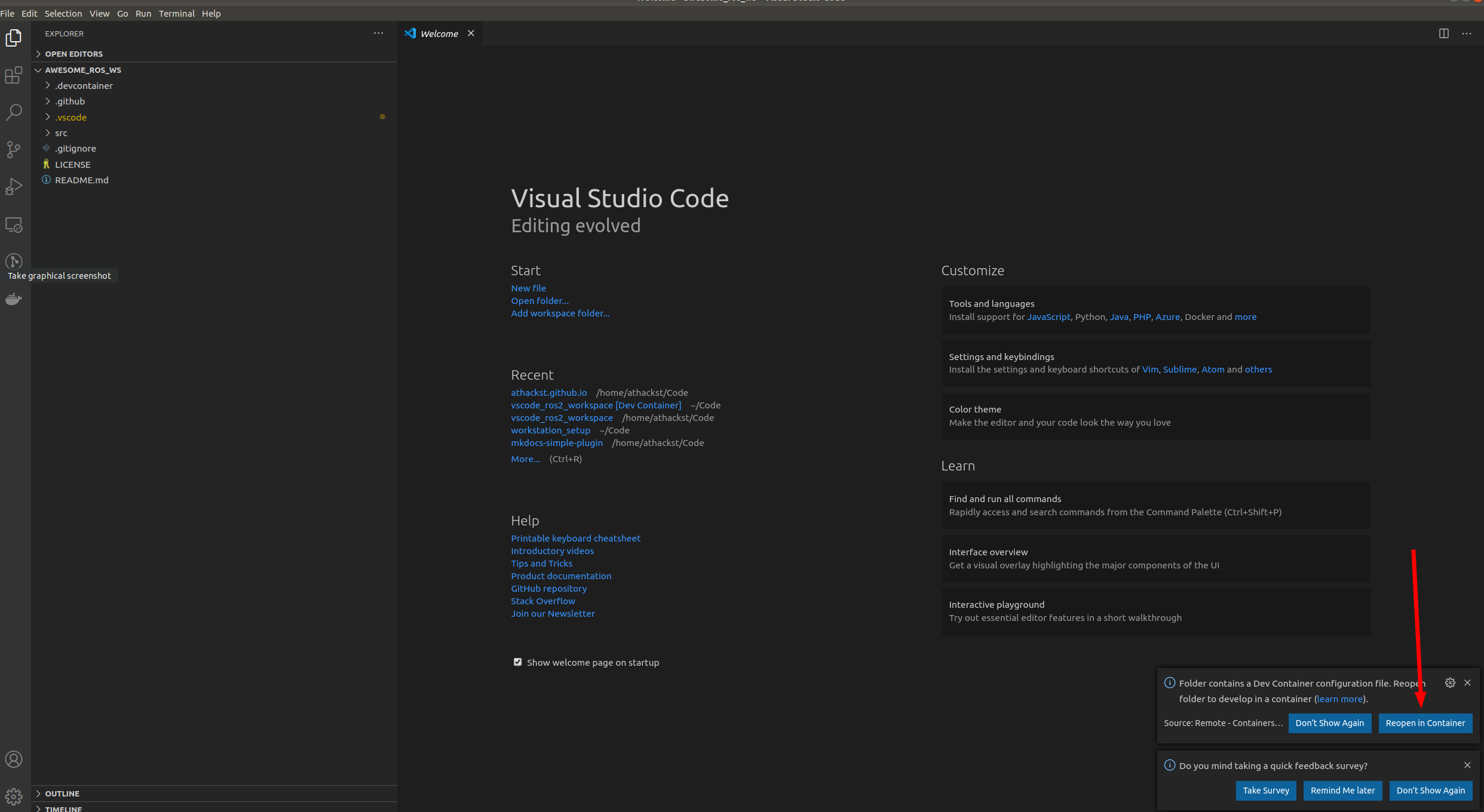
If you don't see the pop-up, click on the little green square in the bottom left corner, which should bring up the container dialog
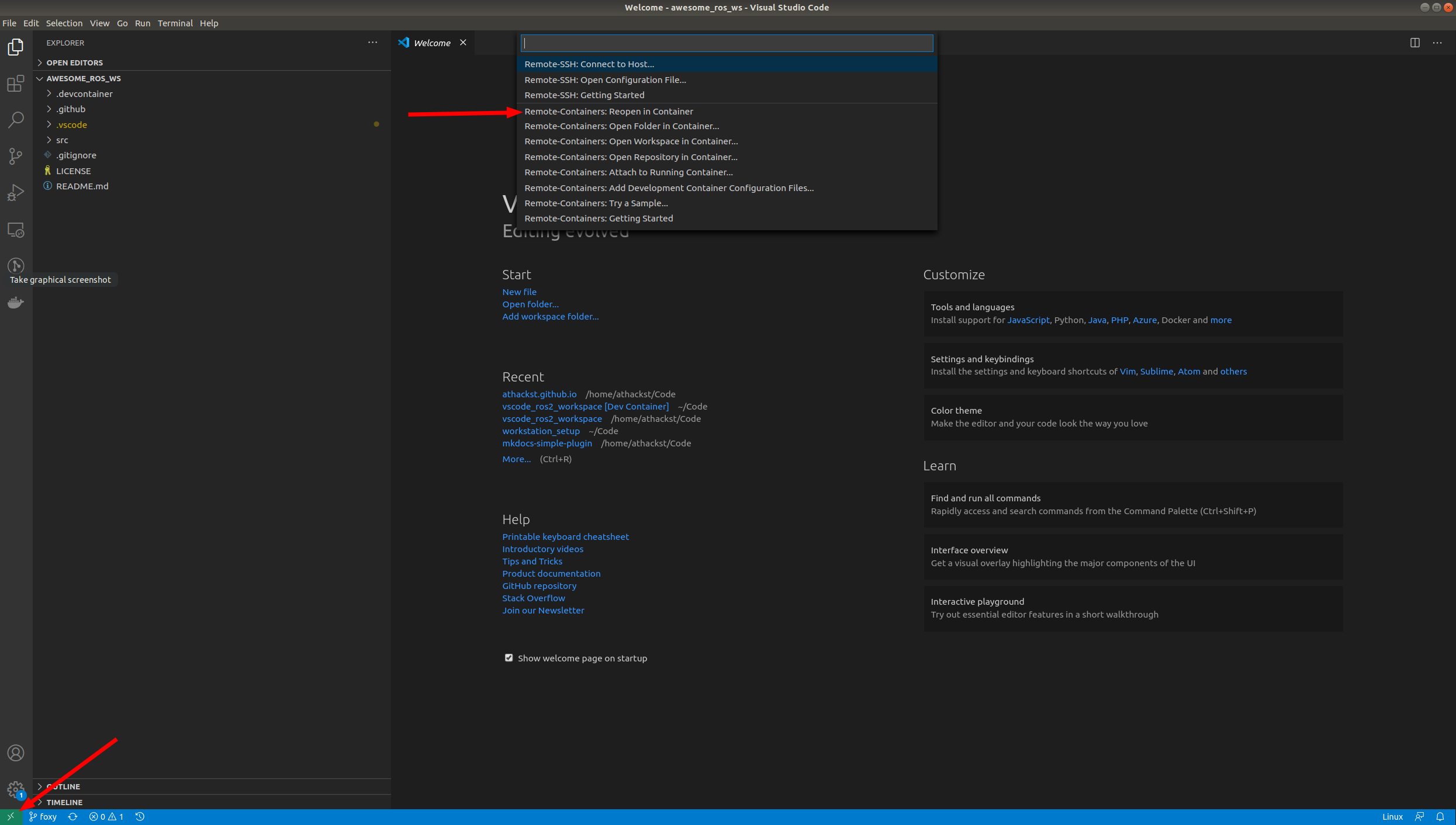
In the dialog, select "Remote Containers: Reopen in container"
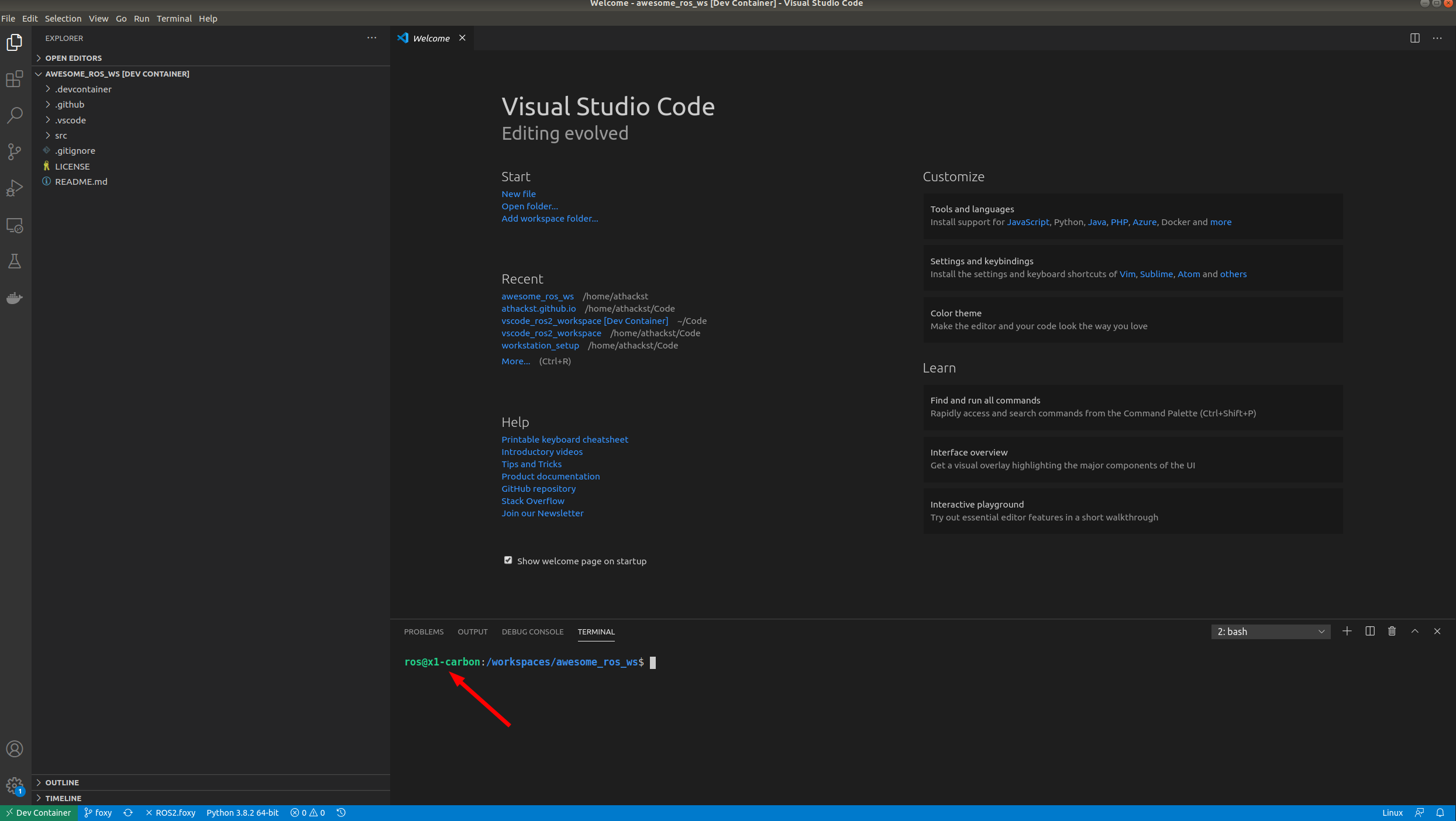
VSCode will build the dockerfile inside of .devcontainer for you. If you open a terminal inside VSCode (Terminal->New Terminal), you should see that your username has been changed to ros, and the bottom left green corner should say "Dev Container"
- Specify the repositories you want to include in your workspace in
src/ros2.reposor deletesrc/ros2.reposand develop directly within the workspace.- If you are using a
ros2.reposfile, import the contentsTerminal->Run Task..->import from workspace file
- If you are using a
- Install dependencies
Terminal->Run Task..->install dependencies - Develop!
See TurtleBot3 - ROBOTIS e-Manual.
TurtleBot is a ROS standard platform robot.
turtlebot3_ws can import turtlebot3 simulation source codes by using vcs.
In addition, Turtlebot3 scripts are prepared in scripts.
Those shell scripts are copied on Desktop in VNC environment.
See docker_ros-desktop-vnc. The Docker image provides HTML5 VNC interface to access Ubuntu LXDE + ROS.