Samples
This repo contains sample files to show you how to use the SDK.
Mobile samples
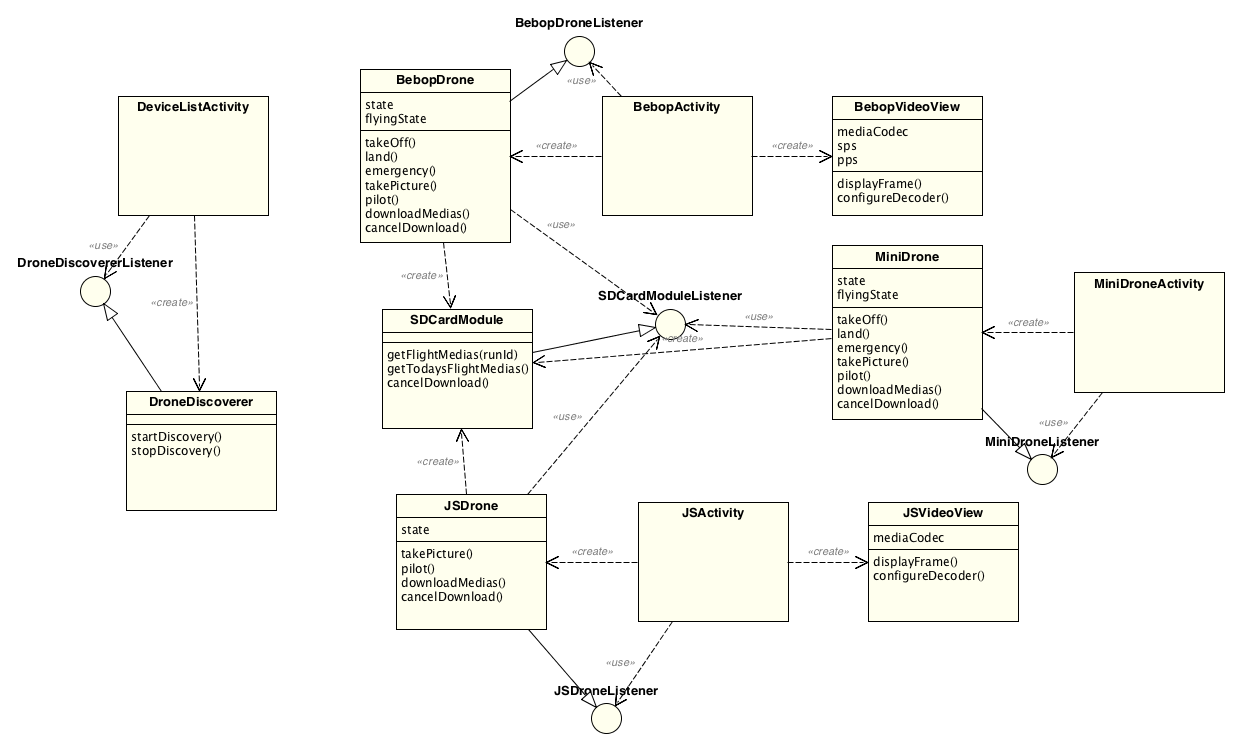
The mobile samples use the following architecture:
They are standalone, this means that you can clone this repo and use them without compiling the SDK. To enable this, they will use the precompiled SDK libraries.
The mobile samples show you how to connect, pilot, take pictures, display video stream if available, and download medias from the drone.
They support the following drones:
- Bebop 2
- Bebop
- JumpingSumo
- Jumping Race
- Jumping Night
- MiniDrone Rolling Spider
- Airborne Cargo
- Airborne Night
- Swing
- Mambo
And the following remote controller:
- SkyController
- SkyController 2
What if you want to only build an app for the Bebop? Simply delete other files than
- DeviceListActivity
- DroneDiscoverer
- BebopActivity
- BebopVideoView
- BebopDrone
- SDCardModule
As said before, each mobile sample can be used without having to build the SDK: it will use the precompiled libraries. But you can also use the sample with your own compiled SDK.
iOS
SDKSample
Use the precompiled SDK (hosted on Github):
Use the buildWithPrecompiledSDK configuration to use the precompiled libraries (Product->Scheme->Edit Scheme).
Please note that the first time you'll build with the precompiled SDK, it will download the precompiled libraries from Github, this might take a while.
By using the precompiled libraries, you don't need to download the sdk source files neither to compile the sdk.
Use your own compiled SDK:
You can build this sample with Alchemy. In your <SDK> execute this command:
./build.sh -p arsdk-ios -t build-sample -j for iOS
./build.sh -p arsdk-ios_sim -t build-sample -j for iOS simulator
Otherwise, if you want to use Xcode to build, first execute this command in <SDK>:
./build.sh -p arsdk-ios -t build-sdk
Then, in XCode, use the buildWithLocalSDK configuration to use your freshly compiled sdk libraries. (Product->Scheme->Edit Scheme).
Please note that there are two targets in the iOS sample: SDKSample and SDKSampleForSkyController2.
The first one is using -lardiscoverywithouteacc in its Other Linker Flags list and does not include the ExternalAccessory framework. However SDKSampleForSkyController2 uses -lardiscovery and includes ExternalAccessory framework.
Android
SDKSample
Use the precompiled SDK (hosted on JCenter):
With Android Studio, open the settings.gradle located in SDKSample/buildWithPrecompiledSDK.
By using the precompiled SDK, you don't need to download the sdk source files neither to compile the sdk.
Use your own compiled SDK:
You can build this sample with Alchemy. In your <SDK> execute this command:
./build.sh -p arsdk-android -t build-sample
Otherwise, if you want to use Android Studio build, first execute this command in <SDK>:
./build.sh -p arsdk-android -t build-sample-jni
Then, in Android Studio, open the settings.gradle located in SDKSample/buildWithLocalSDK.
Native samples
BebopSample
This example enables you to connect to a Bebop drone and send and receive commands to pilot it and get its battery level. It also receives the video stream.
To use it, you'll need to download and compile your own sdk.
Once done, in the sdk root folder, you can build the sample:
./build.sh -p arsdk-native -t build-sample-BebopSample -j
Then run it:
./out/arsdk-native/staging/native-wrapper.sh ./out/arsdk-native/staging/usr/bin/BebopSample
or if you are on a MacOs computer:
./out/arsdk-native/staging/native-darwin-wrapper.sh ./out/arsdk-native/staging/usr/bin/BebopSample
JumpingSumoSample
This example enables you to connect to a JumpingSumo and send and receive commands to pilot it and get its battery level. It also receives the video stream.
To use it, you'll need to download and compile your own sdk.
Once done, in the sdk root folder, you can build the sample:
./build.sh -p arsdk-native -t build-sample-JumpingSumoSample -j
Then run it:
./out/arsdk-native/staging/native-wrapper.sh ./out/arsdk-native/staging/usr/bin/JumpingSumoSample
or if you are on a MacOs computer:
./out/arsdk-native/staging/native-darwin-wrapper.sh ./out/arsdk-native/staging/usr/bin/JumpingSumoSample
External contributions
Contributions from external developers are located in the Contributions folder, then sorted again by OS.
The name of the contributors/authors for each samples are written in the Contributions/CONTRIBUTORS.txt file.