Python library for reading data from DER DE-5000 LCR meter.

This library was written as a weekend project. Its main goal was to know better the DE-5000 meter and to check the possibility to use a non-original IR receiver to read its measurements.
I bought this meter from one of Japanese sellers on eBay for about $100. The lot did not include USB module. I didn't think I'll ever need one.
The LCR meter transmits its data using IR port. I had already the RS-232 connection cable from the UNI-T UT61E multimeter and I was curious if it could work with DE-5000 as well.
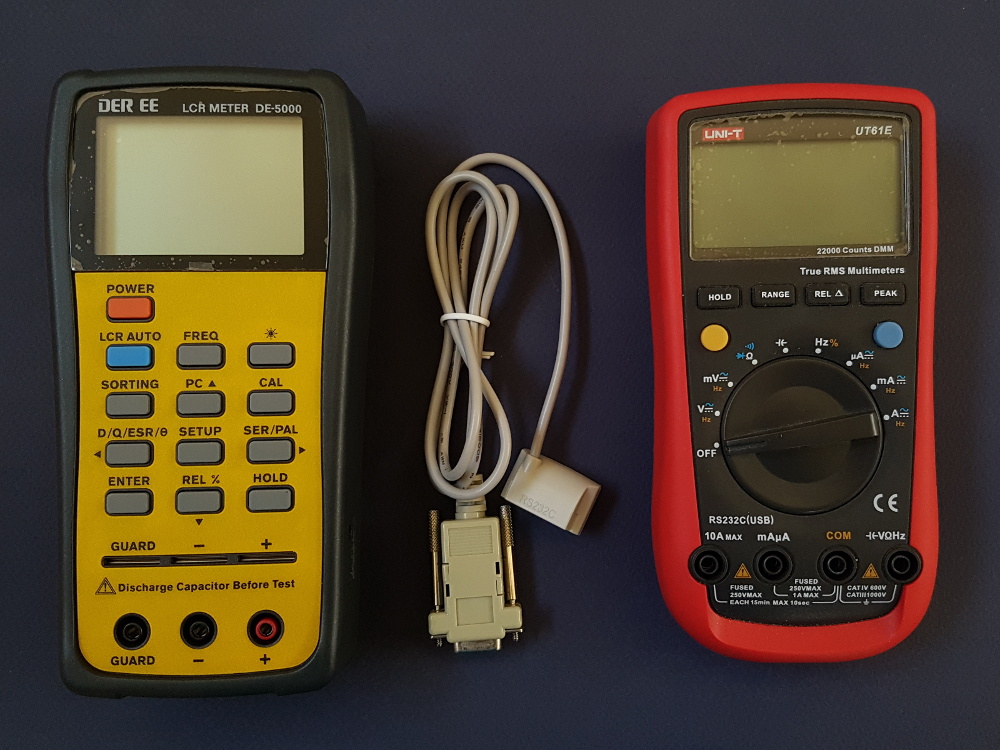
An experiment showed that the IR receiver which comes with UT61E will work fine for reading data from DE-5000. They are not compatible mechanically but if the IR receiver is placed carefully at about 5-10 cm from the LCR meter, the reception is stable. I'm quite sure that it will work with other DER DE multimeters too.
The meter uses Cyrustek ES51919 chipset which is also used in other LCR meters. I could'nt find any official information about it and my only source was ES51919 protocol description and ES51919 driver in sigrok project. They did a very good job on reverse engineering!
Each packet contains 17 bytes.
Byte Meaning
==== =======
0x00 Header, always 0x00
0x01 Header, always 0x0D
0x02 Flags
bit 0: hold enabled
bit 1: reference value shown in delta mode (delta sign is blinking)
bit 2: delta mode
bit 3: calibration mode
bit 4: sorting mode
bit 5: LCR AUTO mode
bit 6: auto range mode (is not used in sorting mode only)
bit 7: parallel measurement (vs. serial)
0x03 Config
bit 0-4: unknown
bit 5-7: test frequency
0 = 100 Hz
1 = 120 Hz
2 = 1 kHz
3 = 10 kHz
4 = 100 kHz
5 = 0 Hz (DC)
0x04 Tolerance in sorting mode
0 = not set
3 = +-0.25%
4 = +-0.5%
5 = +-1%
6 = +-2%
7 = +-5%
8 = +-10%
9 = +-20%
10 = -20+80%
Bytes 0x05-0x09 describe primary measurement
0x05 Measured quantity
1 = inductance
2 = capacitance
3 = resistance
4 = DC resistance
0x06 Measurement MSB (0x4e20 = 20000 = outside limits)
0x07 Measurement LSB
0x08 Measurement info
bit 0-2: decimal point multiplier (10^-val)
bit 3-7: units
0 = no unit
1 = Ohm
2 = kOhm
3 = MOhm
4 = ?
5 = uH
6 = mH
7 = H
8 = kH
9 = pF
10 = nF
11 = uF
12 = mF
13 = %
14 = degree
0x09 Measurement display status
bit 0-3: Display mode
0 = normal (measurement shown)
1 = blank (nothing shown)
2 = lines ("----")
3 = outside limits ("OL")
7 = PASS (sorting mode)
8 = FAIL (sorting mode)
9 = OPEn (calibration mode)
10 = Srt (calibration mode)
bit 4-6: unknown (maybe part of same field with 0-3)
bit 7: unknown
Bytes 0x0A-0x0E describe secondary measurement
0x0A Measured quantity
0 = none
1 = D (dissipation factor)
2 = Q (quality factor)
3 = ESR/RP (serial/parallel AC resistance)
4 = Theta (phase angle)
0x0B Measurement MSB
0x0C Measurement LSB
0x0D Measurement info
bit 0-2: decimal point multiplier (10^-val)
bit 3-7: units (same as in primary measurement)
0x0E Measurement display status. Same as byte 0x09 in primary measurement.
0x0F Footer, always 0x0D
0x10 Footer, always 0x0A
Each measurement value is encoded by 3 bytes: two bytes for value (bytes 0x06, 0x07 for primary and 0x0B, 0x0C for secondary) and 3 bits of another byte for multiplier (bytes 0x08 for primary and 0x0D for secondary). The value can be calculated using the following formula:
(MSB * 0x10000 + LSB) * 10^-multiplier
Class constructor requires serial port name only. all other settings are defined by the following constants.
BAUD_RATE, BITS, PARITY, STOP_BITS: serial port settings (always 9600, 8N1).
TIMEOUT: serial port read timeout.
EOL: footer bytes of valid data packet. Always 0x0D 0x0D (CR, LF or \r\n).
RAW_DATA_LENGTH: data packet size.
READ_RETRIES: packet reading attempts. This value shows how many attempts to receive a valid packet should be made before returning an error.
The DE5000 class contains the following functions:
read_raw_data(self): reads raw data packet from serial port as array of byte values.
is_data_valid(self, raw_data): returns True if the received packet is valid.
read_hex_str_data(self): returns string with hexadecimal byte values of the received packet.
get_meas(self): parses the received packet and returns the data as dicitonary (explained later).
normalize_val(self, val, units): normalizes the measured value to standard units (R to Ohm, C to Farad, L to Henry, others are not changed).
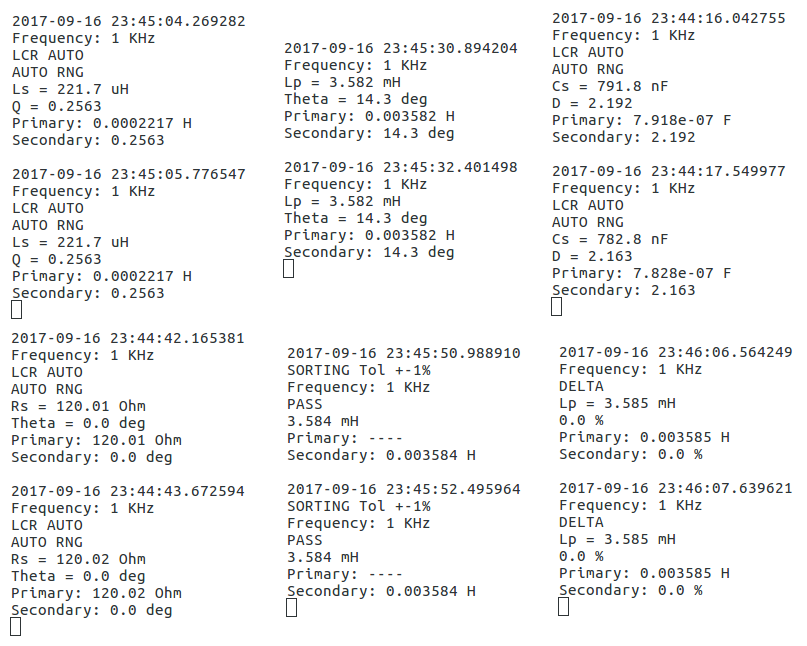
pretty_print(self, disp_norm_val = False): prints the received measurement in human readable form.
The received data is returned by get_meas() function as a dictionary with the following fields:
main_quantity [string]: main displayed quantity (Ls, Lp, Cs, Cp, Rs, Rp, DCR),
main_val [float]: main displayed value,
main_units [string]: main displayed units,
main_status [string]: main display status (value, blank, OL, PASS, FAIL etc.),
main_norm_val [float]: main displayed value, normalized to standard units (Ohm, Farad, Henry),
main_norm_units [string]: units of normalized value,
sec_quantity [string]: secondary displayed quantity (D, Q, Theta, ESR etc.),
sec_val [float]: secondary displayed value,
sec_units [string]: secondary display units,
sec_status [string]: secondary display status (value, blank, OL, ---- etc.),
sec_norm_val [float]: secondary displayed value, normalized to standard units (Ohm, Farad, Henry),
sec_norm_units [string]: units of normalized value,
freq [string]: test frequency,
tolerance [string]: tolerance in sorting mode,
ref_shown [bool]: True if reference value is shown in REL % mode (delta sign is blinking),
delta_mode [bool]: True if the device is in REL % (delta) mode,
cal_mode [bool]: True when calibration mode is active,
sorting_mode [bool]: True if the device is in sorting mode,
lcr_auto [bool]: True if the device is in LCR AUTO mode (autodetection of DUT type),
auto_range [bool]: True if auto range is active (all modes except sorting),
parallel [bool]: True if the measurement is done in parallel mode,
data_valid [bool]: True if data in the dictionary is valid.
PORT: default serial port which will be used if it is not specified in command line.
SLEEP_TIME: time between reading measurements.
The de5000_reader.py script is run from command line using the following command:
python de5000_reader.py [com_port_name]
where [com_port_name] is the name of serial port where your IR receiver is connected. In Windows it will be COM1, COM2 or another COM port. In Linux the will usually be /dev/ttyUSB0, /dev/ttyUSB1 etc. If not specified, the script will use port name stored in PORT constant.
- Adding an option of saving the measured data to csv file.
- Building a custom IR receiver using a USB UART chip (for example CH340G).
- DER DE-5000 page in sigrok Wiki
- Cyrustek ES51919 protocol description in sigrok Wiki
- Cyrustek ES51919 driver in libsigrok project
- DER DE-5000 datasheet
You are more than welcome to contact me with any questions, suggestions or propositions regarding this project. You can:
- Visit my QRZ.COM page
- Visit my Facebook profile
- Write me an email to iosaaris =at= gmail dot com
73 de 4X1MD