This repository is TensorFlow implementation of VDSR (CVPR16).
You can see more details from paper and author's project page
-
Project page : VDSR page
-
Paper : "Accurate Image Super-Resolution Using Very Deep Convolutional Network"
VDSR-TensorFlow/model/network.py

- ILR denotes Interpolated Low Resolution image
- SR denotes reconstructed super resolution image
- VDSR structures
| Layer (# layers) | Filter size | Input Dimension | Output Dimension | Activation Function |
|---|---|---|---|---|
| Input Layer (1) | 1 | 64 | ReLU | |
| Hidden Layer (18) | 64 | 64 | ReLU | |
| Output Layer (1) | 64 | 1 | - |
ReLU (Rectified Linear Unit)
- I/O
| Input (LR) | Output (Residual) | Reconstructed (LR + Residual) |
|---|---|---|
 |
 |
 |
_loss_function(self, reg_parameter) in VDSR-TensorFlow/model/___init__.py
- Basic loss function
- Loss functions for residual learning
-
Regularization
- L2 regularization
-
Notations
: Weights in VDSR
: ground truth (original high resolution image, HR)
: interpolated low resolution image (ILR)
: reconstructed super resolution image
: residual between HR and ILR
-
: regularization parameter
_optimization_function(self, grad_clip, momentum_rate) in VDSR-TensorFlow/model/___init__.py
-
Optimization Method
- Stochastic Gradient Descent (SGD) method [Wikipedia]
- Momentum : 0.9
- Stochastic Gradient Descent (SGD) method [Wikipedia]
-
Weight Initialization
- He initialization [paper]
-
Learning Rate
- Extremely high value is used to speed-up convergence rate
- Initial Learning rate : 0.1
-
Learning Rate Decay
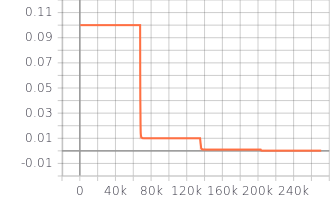
- Learning rate is decreased by factor of 10 for every 20 epochs
-
Adjustable Gradient Clipping
- Clip individual gradients to
denotes parameters for gradient clipping
denotes learning rate
- Clip individual gradients to
-
Epochs : 80

VDSR-TensorFlow/data/generate_dataset/train_data.m
- 291 images
- Download from Author's page [zip(train)]
- Bicubic interpolation is used for LR data acquisition
- Data Augmentations (Rotation, flip) were used
- Scale Factor :
,
- Patch size : 41
- Batch size : 64
VDSR-TensorFlow/data/generate_dataset/test_data.m
- Set5, Set14, B100, Urban100
- Download from Author's page [zip(test)]
- Bicubic interpolation is used for LR data acquisition
- Scale Factor :
,
PSNR performance plot on Set5
- rotation=[0°, 90°], flip=[left / right],
 |
 |
 |
|---|---|---|
| Scale 2 | Scale 3 | Scale 4 |
- rotation=[0°, 90°], flip=[left / right],
 |
 |
 |
|---|---|---|
| Scale 2 | Scale 3 | Scale 4 |
- rotation=[0°, 90°], flip=[left / right],
 |
 |
 |
|---|---|---|
| Scale 2 | Scale 3 | Scale 4 |
- Bicubic Interpolation
- imresize(..., ..., 'bicubic') in Matlab
- VDSR (Original)
- Author's MatConvNet implementation [Code]
- VDSR (TensorFlow)
- TensorFlow implementation
- Train Details for Comparison
- Gradient Clipping parameter
- Data Augmentation
- Rotation : 0°, 90°
- Flip : left / right
- Gradient Clipping parameter
PSNR (Peak Signal-to-Noise Ratio)
SSIM (Strutural SIMility)
-
rotation=[0°, 90°], flip=[left / right],
-
Set5
| scale | Bicubic | VDSR (Original) | VDSR(TensorFlow) |
|---|---|---|---|
| 33.68 / 0.9304 | 37.53 / 0.9586 | 37.07 / 0.9576 | |
| 30.40 / 0.8682 | 33.66 / 0.9213 | 33.20 / 0.9171 | |
| 28.43 / 0.8104 | 31.35 / 0.8838 | 30.90 / 0.8756 |
- Set14
| scale | Bicubic | VDSR (Original) | VDSR(TensorFlow) |
|---|---|---|---|
| 30.24 / 0.8693 | 33.05 / 0.9214 | 32.67 / 0.9108 | |
| 27.54 / 0.7746 | 29.78 / 0.8318 | 29.58 / 0.8295 | |
| 26.00 / 0.7029 | 28.02 / 0.7678 | 27.81 / 0.7627 |
- B100
| scale | Bicubic | VDSR (Original) | VDSR(TensorFlow) |
|---|---|---|---|
| 29.56 / 0.8442 | 31.90 / 0.8960 | 31.65 / 0.8943 | |
| 27.21 / 0.7401 | 28.83 / 0.7976 | 28.66 / 0.7952 | |
| 25.96 / 0.6697 | 27.29 / 0.7252 | 27.14 / 0.7217 |
- Urban100
| scale | Bicubic | VDSR (Original) | VDSR(TensorFlow) |
|---|---|---|---|
| 26.88 / 0.8410 | 30.77 / 0.9141 | 30.20 / 0.9087 | |
| 24.46 / 0.7358 | 27.14 / 0.8279 | 26.69 / 0.8178 | |
| 23.14 / 0.6588 | 25.18 / 0.7525 | 24.85 / 0.7406 |
- rotation=[0°, 90°], flip=[left / right],
- Set5
| scale | Bicubic | VDSR (Original) | VDSR(TensorFlow) |
|---|---|---|---|
| 33.68 / 0.9304 | 37.53 / 0.9586 | 37.14 / 0.9574 | |
| 30.40 / 0.8682 | 33.66 / 0.9213 | 33.29 / 0.9171 | |
| 28.43 / 0.8104 | 31.35 / 0.8838 | 30.95 / 0.8755 |
- Set14
| scale | Bicubic | VDSR (Original) | VDSR(TensorFlow) |
|---|---|---|---|
| 30.24 / 0.8693 | 33.05 / 0.9214 | 32.74 / 0.9105 | |
| 27.54 / 0.7746 | 29.78 / 0.8318 | 29.62 / 0.8291 | |
| 26.00 / 0.7029 | 28.02 / 0.7678 | 27.84 / 0.7628 |
- B100
| scale | Bicubic | VDSR (Original) | VDSR(TensorFlow) |
|---|---|---|---|
| 29.56 / 0.8442 | 31.90 / 0.8960 | 31.69 / 0.8936 | |
| 27.21 / 0.7401 | 28.83 / 0.7976 | 28.68 / 0.7947 | |
| 25.96 / 0.6697 | 27.29 / 0.7252 | 27.15 / 0.7214 |
- Urban100
| scale | Bicubic | VDSR (Original) | VDSR(TensorFlow) |
|---|---|---|---|
| 26.88 / 0.8410 | 30.77 / 0.9141 | 30.29 / 0.9085 | |
| 24.46 / 0.7358 | 27.14 / 0.8279 | 26.78 / 0.8186 | |
| 23.14 / 0.6588 | 25.18 / 0.7525 | 24.90 / 0.7418 |
- rotation=[0°, 90°], flip=[left / right],
- Set5
| scale | Bicubic | VDSR (Original) | VDSR(TensorFlow) |
|---|---|---|---|
| 33.68 / 0.9304 | 37.53 / 0.9586 | 37.08 / 0.9574 | |
| 30.40 / 0.8682 | 33.66 / 0.9213 | 33.19 / 0.9166 | |
| 28.43 / 0.8104 | 31.35 / 0.8838 | 30.88 / 0.8743 |
- Set14
| scale | Bicubic | VDSR (Original) | VDSR(TensorFlow) |
|---|---|---|---|
| 30.24 / 0.8693 | 33.05 / 0.9214 | 32.66 / 0.9105 | |
| 27.54 / 0.7746 | 29.78 / 0.8318 | 29.54 / 0.8288 | |
| 26.00 / 0.7029 | 28.02 / 0.7678 | 27.75 / 0.7617 |
- B100
| scale | Bicubic | VDSR (Original) | VDSR(TensorFlow) |
|---|---|---|---|
| 29.56 / 0.8442 | 31.90 / 0.8960 | 31.65 / 0.8940 | |
| 27.21 / 0.7401 | 28.83 / 0.7976 | 28.66 / 0.7945 | |
| 25.96 / 0.6697 | 27.29 / 0.7252 | 27.14 / 0.7209 |
- Urban100
| scale | Bicubic | VDSR (Original) | VDSR(TensorFlow) |
|---|---|---|---|
| 26.88 / 0.8410 | 30.77 / 0.9141 | 30.13 / 0.9076 | |
| 24.46 / 0.7358 | 27.14 / 0.8279 | 26.68 / 0.8171 | |
| 23.14 / 0.6588 | 25.18 / 0.7525 | 24.84 / 0.7402 |
- "img002" of Urban100 for scale factor
- rotation=[0°, 90°], flip=[left / right],
| Ground Truth | Bicubic | VDSR(TensorFlow) |
|---|---|---|
 |
 |
 |
 |
 |
 |
- rotation=[0°, 90°], flip=[left / right],
| Ground Truth | Bicubic | VDSR(TensorFlow) |
|---|---|---|
 |
 |
 |
 |
 |
 |
- rotation=[0°, 90°], flip=[left / right],
| Ground Truth | Bicubic | VDSR(TensorFlow) |
|---|---|---|
 |
 |
 |
 |
 |
 |
On Windows
- run.bat
On Linux
- run.sh
-
Python 3
pip install -r requirements.txt
- tensorflow
- h5py
- numpy + mkl
- scipy
- Pillow
- skimage
-
Matlab
- For data generation and performance evaluation
- image processing toolbox
- in run.bat/sh
- python main.py --model_name=vdsr --is_train=True --grad_clip=1e-3
If you want to change other parameters for training, please see the file
VDSR-TensorFlow/model/configurations.py
in run.bat
python main.py --model_name=vdsr --is_train=False
- checkpoint
- Trained with
- Trained with
- Trained with
- Trained with
- vdsr_train.h5
- rotation=[0°, 90°], flip=[left / right] [download]
math equations are converted with upmath.me