- SUMO Co-simulation Ph.I
- know how SUMO works, and how with CARLA
- collect related examples as initialization
- ?
- SUMO Co-simulation Ph.II
- SUMO Co-simulation Ph.III
- SUMO Co-simulation Ph.IV


@INPROCEEDINGS{INVS2021
author={Z. {Zhang} and S. {Wang} and Y. {Hong} and L. {Zhou} and Q. {Hao},
title={Distributed dynamic map fusion via federated learning for intelligent networked vehicles},
booktitle={2021 {IEEE} International Conference on Robotics and Automation, {ICRA}
2021, Xi’an, China, May 2021},
year={2021}
}- Ubuntu 18.04
- Python 3.7+
- CARLA >= 0.9.8, <=0.9.10
- CUDA>=10.0
- pytorch<=1.4.0
- llvm>=10.0
-
Clone this repository to your workspace
git clone https://github.com/lasso-sustech/CARLA_INVS.git --branch=main --depth=1 -
Enter the directory "CARLA_INVS" and install dependencies with
makemake dependency
It uses
aptandpip3with network access. You can try speed up downloading with fast mirror sites. -
Download and extract the CARLA simulator somewhere (e.g.,
~/CARLA), and updateCARLA_PATHinparams.pywith absolute path to the CARLA folder location.
This repository is composed of three components:
gen_datafor dataset generation and visualization,PCDetfor training and testing,fusionfor global map fusion and visualization.The three components share the same configuration file
params.py.
Features: 1) LiDAR/camera raw data collection in multi-agent synchronously; 2) data transformation to KITTI format; 3) data visualization with Open3d library.
Tuning: Tune the configurations as you like in
params.pyfile under thegen_datasection.
-
start up
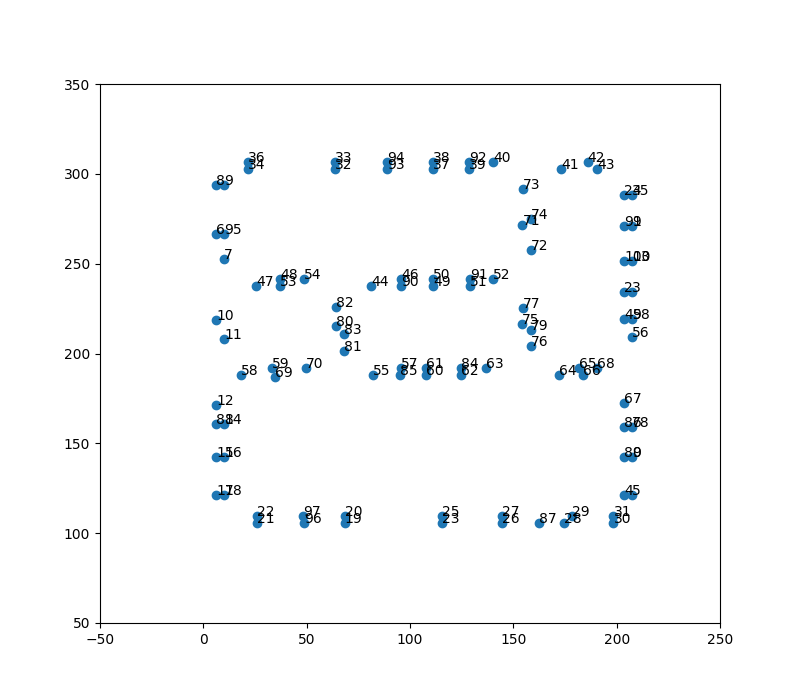
CarlaUE4.shin yourCARLA_PATHfirstly and run the following script in shell to look for vehicles spawn points with point_id.python3 gen_data/Scenario.py spawn
-
run the following script to generate multi-agent raw data
python3 gen_data/Scenario.py record [x_1,...x_N] [y_1,...y_M]
where
x_1,...,x_Nis list of point_ids (separated by comma) for human-driven vehicles, andy_1,...,y_Mfor autonomous vehicles with sensors installation.The recording process would stop when
Ctrl+Ctriggered, and the generated raw data will be put at$ROOT_PATH/raw_data. -
Run the following script to transform raw data to KITTI format
python3 gen_data/Process.py raw_data/record2020_xxxx_xxxx
and the cooked KITTI format data will be put at
$ROOT_PATH/dataset -
(Optional) run the following script to view KITTI Format data sample with Open3D
# The vehicle_id is the intelligent vehicle ID, and the frame_ID is the index of dataset. python3 gen_data/Visualization.py dataset/record2020_xxxx_xxxx vehicle_id frame_id



- prepare sample dataset in
$ROOT_PATH/data(link) - run
python3 PCDet/INVS_main.py
To be updated.
cd fusion;
python3 visualization/Visualization_local.py ../data/record2020_1027_1957 713 39336cd fusion;
python3 visualization/Visualization_fusion_map.py ../data/record2020_1027_1957 38549Should you have any question, please create issues, or contact Shuai Wang.
tmp
+- record2020_xxxx_xxxx
+- label #tmp labels
+- vhicle.xxx.xxx_xxx
+- sensor.camera.rgb_xxx
+- 0000.jpg
+- 0001.jpg
+- sensor.camera.rgb_xxx_label
+- 0000.txt
+- 0001.txt
+- sensor.lidar.rgb_cast_xxx
+- 0000.ply
+- 0001.ply
+- vhicle.xxx.xxx_xxx
label is the directory to save the tmp labels.
dataset
+- record2020_xxxx_xxxx
+- global_label #global labels
+- vhicle.xxx.xxx_xxx
+- calib00
+- 0000.txt
+- 0001.txt
+- image00
+- 0000.jpg
+- 0001.jpg
+- label00
+- 0000.txt
+- 0001.txt
+- velodyne
+- 0000.bin
+- 0001.bin
+- vhicle.xxx.xxx_xxx
-
label is the directory to save the ground truth labels.
-
calib is the calibration matrix from point cloud to image.