The goal of this project is to create a simulation of a drone that inspects a portion of a predefined territory to verify through cameras any plant diseases in the monitored area.
This project is divided into two parts, this repo focuses on the simulation of the drone, including a sort of digital twin approach, in which data from all sensors and GPS are acquired using ROS 2 and stored into two .csv files with the purpose to be further processed in Matlab creating a simulation of a "Digital Twin".
The cameras and the identification of the plants' disease are managed in a different project.
The project uses different tools to achieve its goal:
- PX4-Autopilot;
- QGroundControl
- Ubuntu 20.04 VM;
- ROS 2 Foxy;
- uXRCE-DDS;
- Matlab;
In this repo will be described the installation of each tool and the tutorial to get the desidered results.
The report of the project in Italian can be found here.
This installation tutorial is meant to be for Ubuntu 20.04 using ROS2 Foxy and the latest version of PX4 at the moment of writing this (05/09/2023).
Clone the PX4 source code from the repository.
git clone https://github.com/PX4/PX4-Autopilot.git --recursive
bash ./PX4-Autopilot/Tools/setup/ubuntu.shTo validate the system before proceeding with the installation of ROS2 and other components we can build the SITL (Software In The Loop) with the default drone.
cd PX4-Autopilot
make px4_sitl gazebo-classic

Before installing ROS2 it should be ensured that the locale supports UTF-8
localeif not, it should be updated as follows:
sudo apt update && sudo apt install locales
sudo locale-gen en_US en_US.UTF-8
sudo update-locale LC_ALL=en_US.UTF-8 LANG=en_US.UTF-8
export LANG=en_US.UTF-8A different language can be used, as long as it supports UTF-8.
Once the locale has been set, it is possible to setup the sources in order to install ROS 2.
sudo apt install software-properties-common
sudo add-apt-repository universe
sudo apt update && sudo apt install curl -y
sudo curl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.key -o /usr/share/keyrings/ros-archive-keyring.gpg
echo "deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/ros-archive-keyring.gpg] http://packages.ros.org/ros2/ubuntu $(. /etc/os-release && echo $UBUNTU_CODENAME) main" | sudo tee /etc/apt/sources.list.d/ros2.list > /dev/nullBefore installing ROS 2 packages it is better to update apt caches:
sudo apt update
sudo apt upgradeOnce the caches has been updated it is possible to install all the ROS 2 packages, the recommended install is the desktop one:
sudo apt install ros-foxy-desktop python3-argcompleteIn order to set up the environment it is needed to source the setup file as follows:
source /opt/ros/foxy/setup.bashSome python dependencies for ROS 2 must be also installed:
pip install --user -U empy pyros-genmsg setuptoolsTo check if the installation is has ended successfully it is possible to run a simple talker-listener example, run the following two demo examples in two different terminal:
ros2 run demo_nodes_cpp talker
ros2 run demo_nodes_py listener
In order to let ROS 2 communicate with PX4 it is being used the uXRCE-DDS Agent, the following instructions are used to build the standalone agent from source and connect the client to the PX4 simulator.
git clone https://github.com/eProsima/Micro-XRCE-DDS-Agent.git
cd Micro-XRCE-DDS-Agent
mkdir build
cd build
cmake ..
make
sudo make install
sudo ldconfig /usr/local/lib/The agent should be started with the following command:
MicroXRCEAgent udp4 -p 8888
Once PX4, ROS 2 and uXRCE-DDS have been correctly set up it is possible to start the demo.
In order to initialize the simulation to the right position is necessary to set Home latitude, longitude and altitude of the drone.
cd PX4-Autopilot
export PX4_HOME_LAT=38.25905277824533
export PX4_HOME_LON=15.595626222658453
export PX4_HOME_ALT=0This will initialize the position to the Department of Engineering of the University of Messina.

It is possible to start the simulation for PX4 with gazebo using the following command:
HEADLESS=1 make px4_sitl gazebo-classicThe HEADLESS=1 option allows to run the simulation without the GUI, with the purpose to not require too many computational resources, since the simulation of the drone will be visualized from QGroundControl.
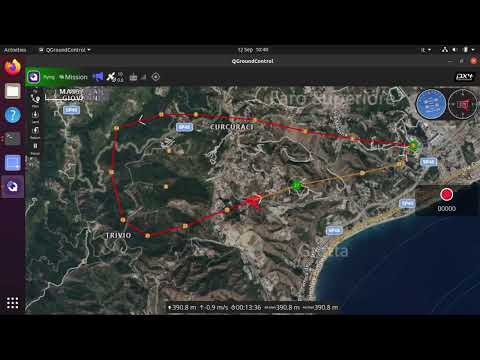
QGroundControl is used to plan the simulated mission that the drone should do.

From the plan tab it is possible to plan the mission adding waypoints to realize the path the drone should follow during its mission, as can be seen below. The Region Of Interest (ROI) waypoint is used to add the region that should be inspected from the drone during its mission. The final missionplan is shared in order to have the same results.

To achieve the goal of making a sort of Digital Twin of the simulated drone it is necessary to find the topic to which subscribe in order to acquire the desidered informations.
In the dds_topic.yaml in the PX4-Autopilot repository are defined all the possible topics to which is possible to subscribe.
For the proposed approach the topic selected are SensorCombined and SensorGPS, these two topic are handled by two different nodes, the first one will acquire all the data from the sensors in the SI, these data will be then displayed into the terminal in run-time and stored to a .csv file in order to be further processed if needed; the latter node is the SensorGPS, which handles messages about the GPS Position of the drone, also this time data will be displayed into the terminal and saved to a .csv file to be further processed.
All other uORB topics can be checked into the uORB Message Reference
In order to acquire messages from the PX4 simulation a subscriber node is required, for this reason in the src are present two directories containing the two types of messages and the code for the subscribers nodes respectively.
In the Messages directory the two type of messages are defined, the directory containes also the CMakeLists to build the package.
The Code directory has inside the code folder the two nodes definition in cpp, one for all the sensors data and one for the GPS position.
To build the packages download the src folder and use colcon to build from the main project directory
sudo apt install python3-colcon-common-extensions
colcon buildAfter the build it will be possible to source the local setup and then run the launch files for each package.
source install/local_setup.bashLaunch command for all the sensors data:
ros2 launch px4_ros sensor_combined_listener.launch.py
Launch command for the GPS position data:
ros2 launch px4_ros gps_data_listener.launch.py
In the matlab_sim folder are contained the livescript and the relative csv which has been subsampled using the appropriate python script, this is done due to computation time constrains, being that with the available hardware the simulation runs about 50 pt/h, which makes almost impossible to run a simulation on the entire .csv, that contains over 3000 points.
The livescript starts by acquiring the data from .csv
T = readtable("subsampled.csv");Then the data in processed in order to visualize the starting point of the mission in both 2D and 3D map

and then also the track that the drone should follow is displayed.

Then the track of the drone is visualized in a topographic chart, while in the 3D visualization a view of what a possible camera could record is displayed.
In this simulation the coordinates of the drone are displayed as the point moves from the start location to the end location, also the distance covered from the start location is displayed.

In the same livescript the data retrieved from the csv are also processed to get the cumulative distance covered by the drone, including taking into account also altitude changes.