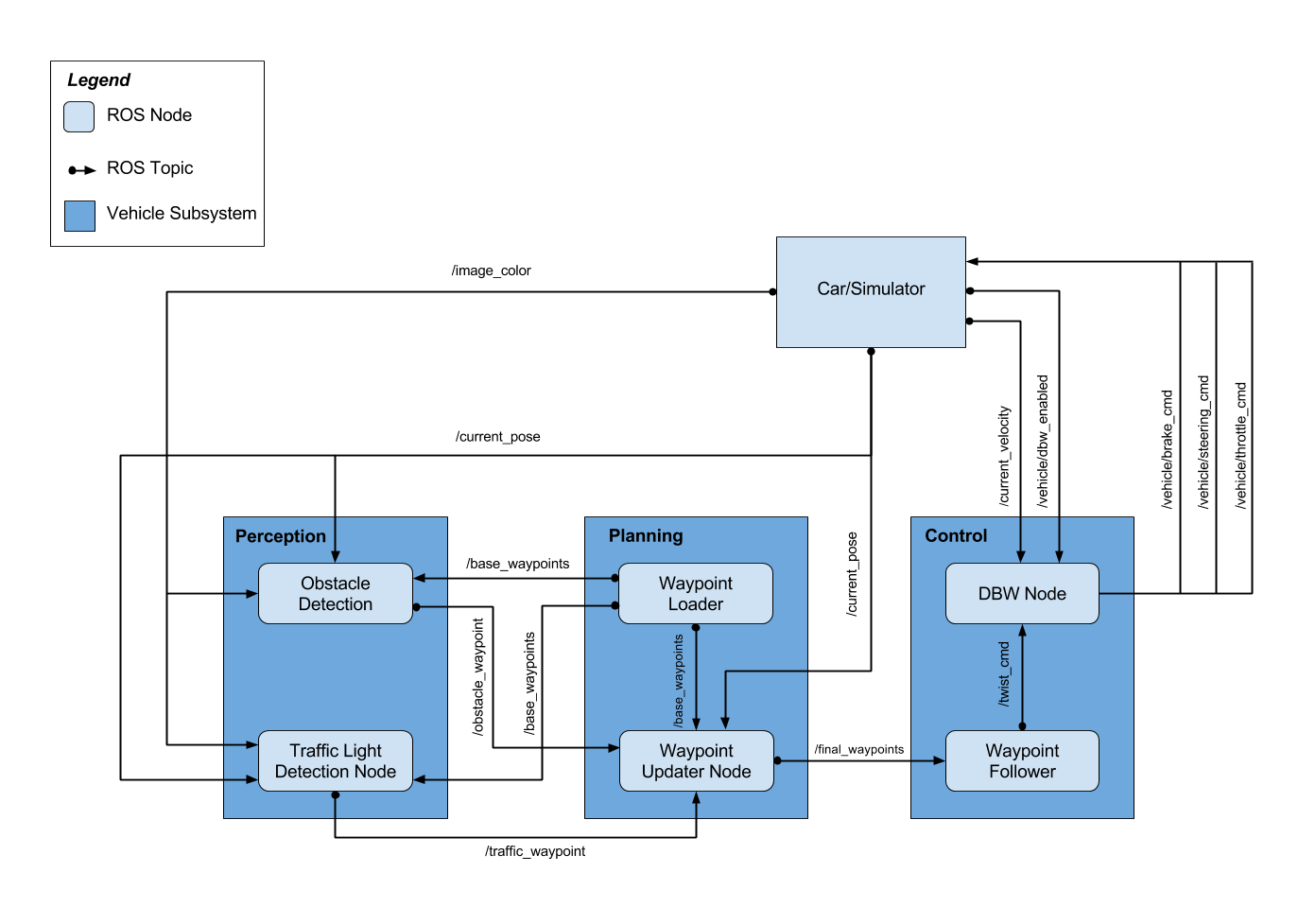
The architecture of the system is depicted below. The system consists of three key modules: Perception ,Planning , and Control . Each module consists of one or more ROS nodes, which utilize publish/subscribe (pub-sub) and request/response patterns to communicate critical information with each other while processing information that helps to drive the car.
At a high level perspective, the Perception module includes functionality that perceives the environment using attached sensors (cameras, lidars, radars, etc.), such as lane lines, traffic lights, obstacles on the road, state of traffic lights, etc. This information is passed to the Planning module, which includes functionality to ingest the perceived environment, and uses that to publish a series of waypoints ahead of the car along with target velocities. The waypoints constitute a projected trajectory for the car. The Control module takes the waypoints and executes the target velocities on the car’s controller. The car is equipped with a drive-by-wire (DBW) functionality that allows the controller to set its throttle (acceleration and deceleration), brake and steering angle commands. When the commands are executed, the car drives itself on the calculated trajectory. The entire cycle repeats itself continually so that the car continues driving. The modules are implemented as a set of ROS Nodes.
Please use one of the two installation options, either native or docker installation.
-
Be sure that your workstation is running Ubuntu 16.04 Xenial Xerus or Ubuntu 14.04 Trusty Tahir. Ubuntu downloads can be found here.
-
If using a Virtual Machine to install Ubuntu, use the following configuration as minimum:
- 2 CPU
- 2 GB system memory
- 25 GB of free hard drive space
The Udacity provided virtual machine has ROS and Dataspeed DBW already installed, so you can skip the next two steps if you are using this.
-
Follow these instructions to install ROS
- ROS Kinetic if you have Ubuntu 16.04.
- ROS Indigo if you have Ubuntu 14.04.
-
- Use this option to install the SDK on a workstation that already has ROS installed: One Line SDK Install (binary)
-
Download the Udacity Simulator.
Build the docker container
docker build . -t capstoneRun the docker file
docker run -p 4567:4567 -v $PWD:/capstone -v /tmp/log:/root/.ros/ --rm -it capstoneTo set up port forwarding, please refer to the instructions from term 2
-
Clone the project repository
-
Install python dependencies
cd CarND-Capstone
pip install -r requirements.txt- Make and run styx
cd ros
catkin_make
source devel/setup.sh
roslaunch launch/styx.launch- Run the simulator
- Download training bag that was recorded on the Udacity self-driving car.
- Unzip the file
unzip traffic_light_bag_file.zip- Play the bag file
rosbag play -l traffic_light_bag_file/traffic_light_training.bag- Launch your project in site mode
cd CarND-Capstone/ros
roslaunch launch/site.launch- Confirm that traffic light detection works on real life images