tuw_laserscan_features for ROS2
Feature extractor for laserscan message such as lines and line segments

nodes
The package holds currently the following nodes
- linedetection
- feature_viz
- composed_node
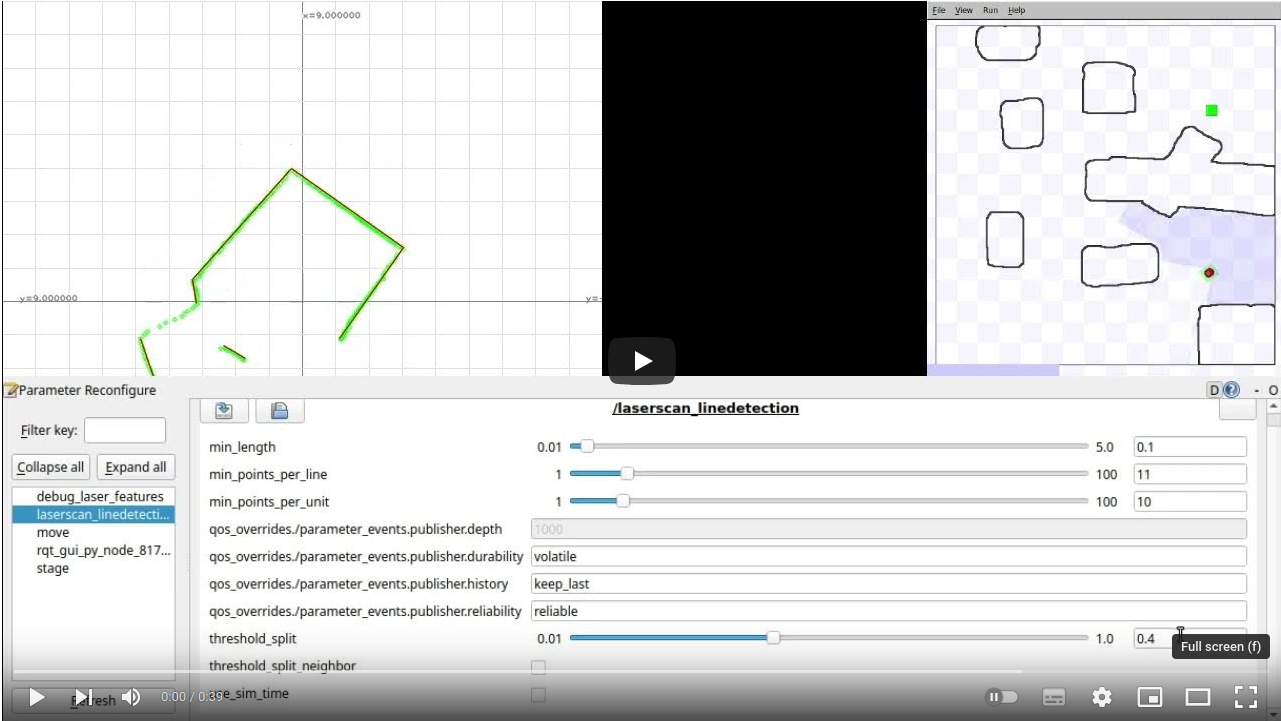
linedetection
Line detection based on a divide and conquer algoritm and detects lines within a sensor_msgs/LaserScan msg and publishes line segments tuw_geometry_msgs/LineSegments
- Input:
- Topic: scan
- Type:
sensor_msgs/LaserScan
- Output:
- Topic line_segments
- Type:
tuw_geometry_msgs/LineSegments
- Parameter:
- threshold_split_neighbor, bool, default: false
- threshold_split, double, default: 0.05, split threshold [m]
- min_length, double, default: 0.1, min line length [m]
- min_points_per_line, int , default: 20, minimal number of points supporting a line
- min_points_per_unit, int, default: 10, minimal number of points supporting a unit
feature_viz
It utilizes the tuw::figure class for a visualization
- Input:
- Topic: scan
- Type:
sensor_msgs/LaserScan
- Type:
- Topic line_segments
- Type:
tuw_geometry_msgs/LineSegments
- Type:
- Topic: scan
composed_node
A demo which hows how to combine multiple nodes into one process. In this case the linedetection and feature_viz node are fused into one process.