Automatic control of an UR3e 6 joints robot hand based on the detected human hand gestures.
-
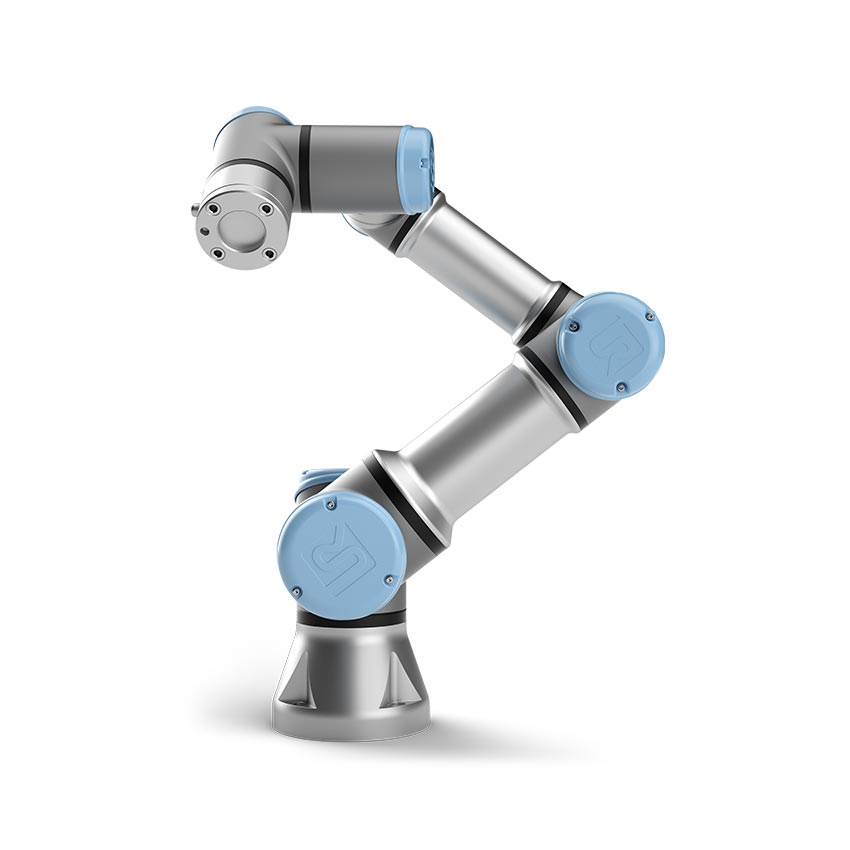
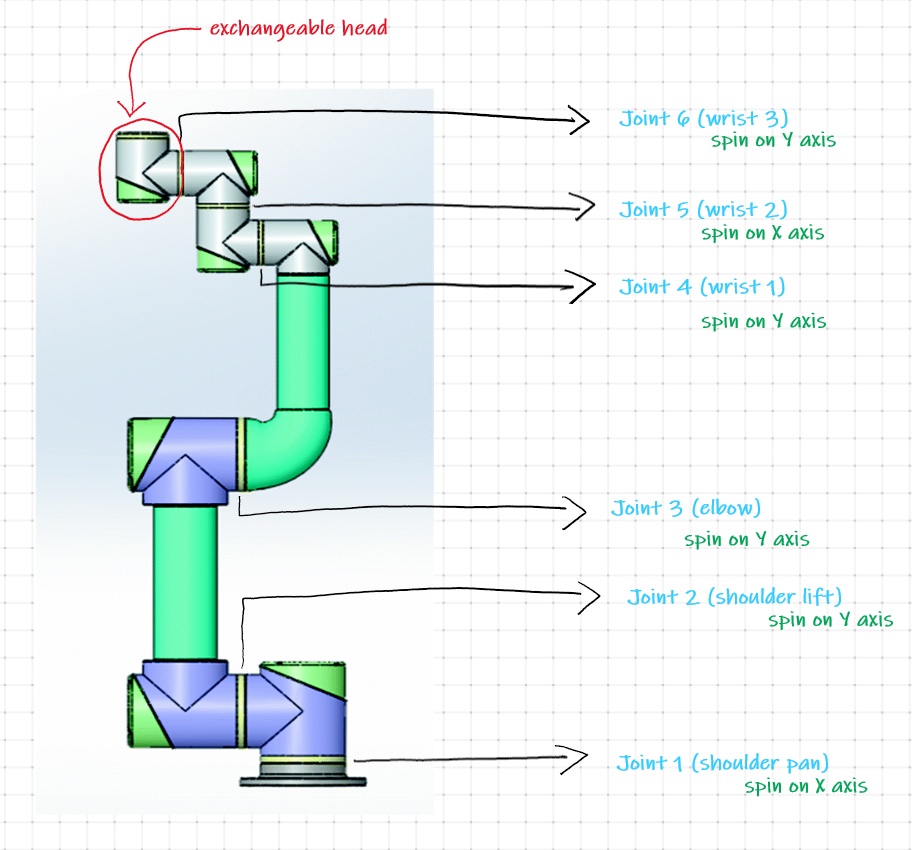
What is an UR3e 6 joints robot?
-
-
"The UR3e collaborative robot is a smaller collaborative table-top robot, perfect for light assembly tasks and automated workbench scenarios. The compact table-top cobot weighs only 24.3 lbs (11 kg), but has a payload of 6.6 lbs (3 kg), ±360-degree rotation on all wrist joints, and infinite rotation on the end joint."
-
-


-
Our Solution
- Create a custom Hand Gesture System based on Human Hand Gestures which are recognized by a Trained Neuronal Network.
- Based on the gesture, instructions are sent to the robot in order to controll it.
-
Gesture System
- Hand Gesture Movement System
 - Hand Gesture **Base Rotation & Gripper Controll** System
- Hand Gesture **Base Rotation & Gripper Controll** System
-
How it works
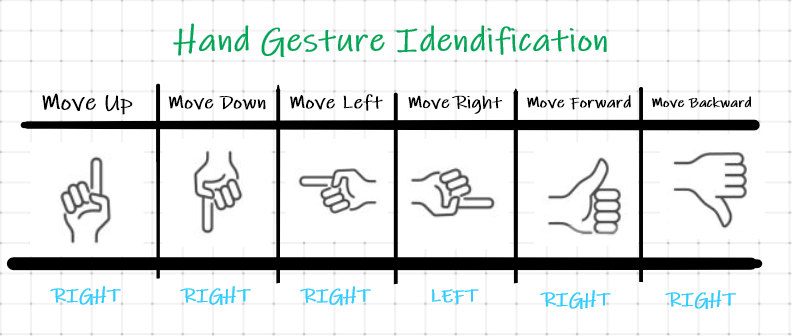
- First, the human interacting with the robot must specify via the
Hand Gesture Identificationtable the direction in which the TCP will move. - Once the gesture has been detected, using the
ur_library.pylibrary, instructions are sent to the robot which moves 1cm at a time in the given direction. - To stop the movement, simply stop indicating the gesture.
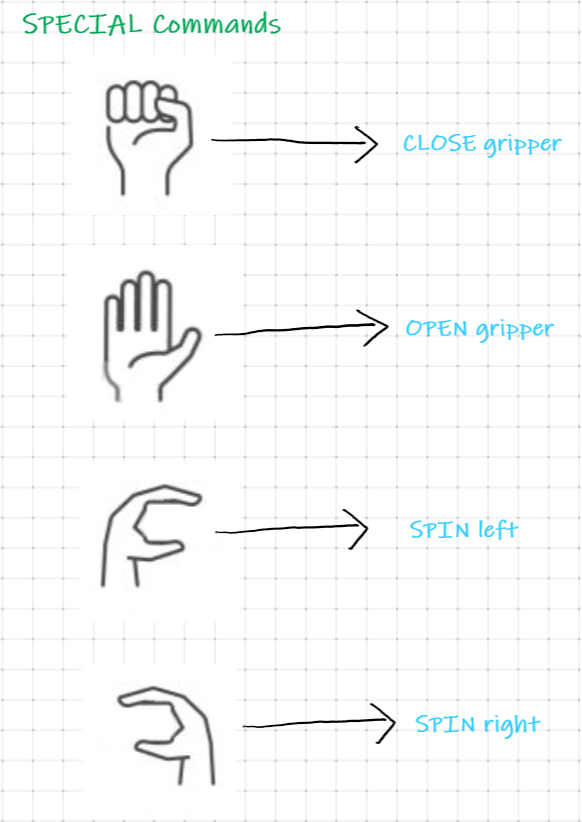
- In order to rotate the base on a different direction, the
SPIN left/rightgesture from theSPECIAL Commandstable must be used. - In order to
CLOSE/OPEN gripper, use the gestures presented inSPECIAL Commandstable.
- First, the human interacting with the robot must specify via the


-
Component1: genedate data samples (
generate_samples.py)-
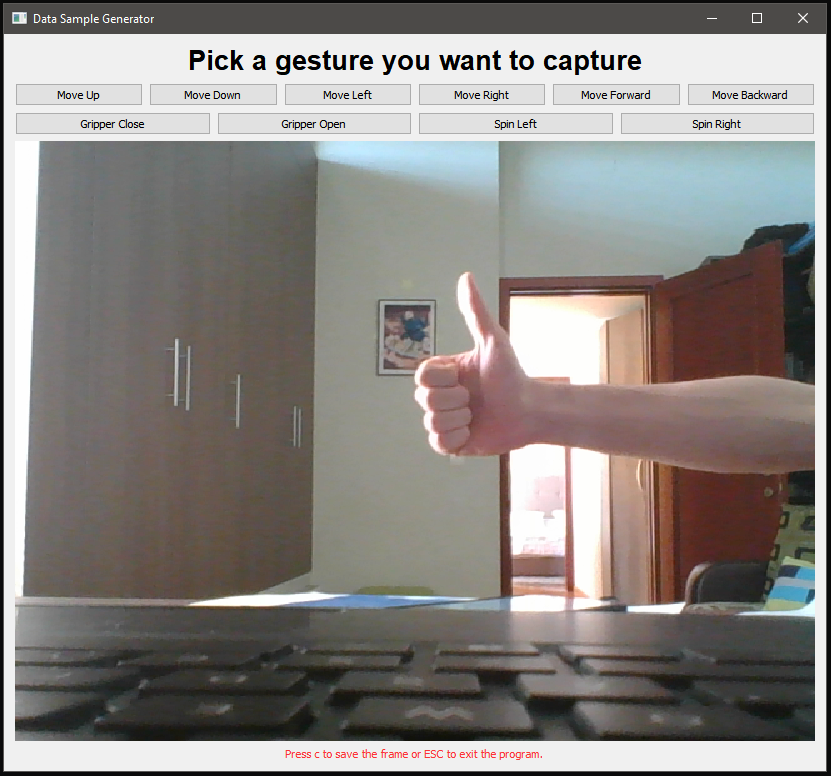
- Ussage:
python3 generate_samples.py - Scope: this program's purpose is to help the user create/expand a data set for the given gestures. Select a Gesture and then press
cin order to capture the frame and save it undertrain_data/images/categorizes/<gesture>
-
-
Component2: train neuronal network (
colab)- https://colab.research.google.com/drive/1gl4ZZTF66uqQOuVOxGaAYMsDkpUI2mAB#scrollTo=7SFT3mUiW4rK
- Ussage: follow the steps as presented in the colab, then download the created model.
-
Component3: object detection (
detect.py)- Ussage: used within Component5
- Scope: implement a continous detection loop on the given frame and return the results.
-
Component4: ur3e library (
ur_library.py)-
- Ussage: used within Component5
- Scope:
-
-
Component5: interactive GUI (
app_controller.py)-
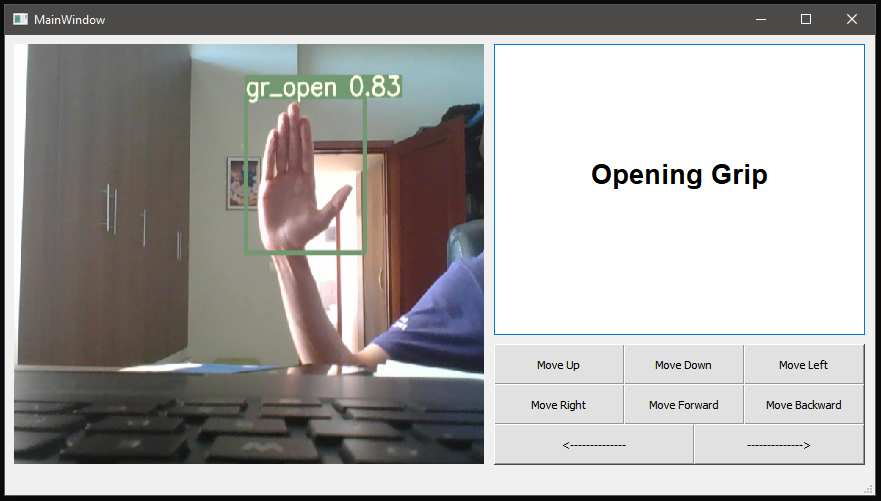
- Ussage:
python3 app_controller.py - Scope: link all components into a clean interface which displays the input (video feed) and output (robot movement)
-
-
Component6: dataset (
LINK)



- python-urx: v0.11.02 https://github.com/Mofeywalker/python-urx
- yolov5: https://github.com/ultralytics/yolov5
pip install PyQt5 seaborn pandas matplotlib pyyaml tqdm torchvision image requests torch urx opencv-python PySide2