Implementation of our paper submission for ICRA2020.
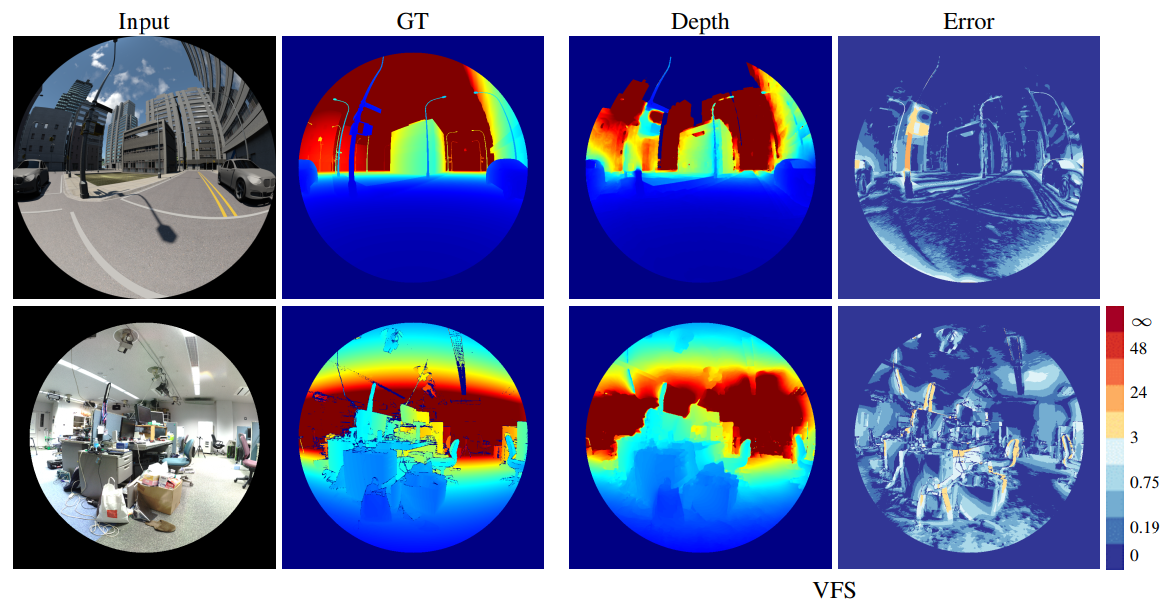
Menandro Roxas and Takeshi Oishi, "Real-Time Variational Fisheye Stereo without Rectification and Undistortion," arXiv preprint
- OpenCV, OpenCV Contrib (optflow) (tested with v4.10.0)
- CUDA 10.1 (Including Samples for headers)
- Visual Studio 2019
The solution consists of two projects - stereotgv and test_vfs. stereotgv generates a static library from which test_vfs links. test_vfs generates a Win32 .exe file.
There is a lib_link.h header (for both project) that links the necessary libraries. Modify the directories:
#define LIB_PATH "D:/dev/lib64/"
#define CV_LIB_PATH "D:/dev/lib64/"
#define CUDA_LIB_PATH "C:/Program Files/NVIDIA GPU Computing Toolkit/CUDA/v10.1/lib/x64/"
to point to the location of OpenCV (CV_LIB_PATH) and CUDA (CUDA_LIB_PATH) .lib files.
At the same time, modify the Project Properties -> VC++ Directories -> (Executables, Includes, and Libraries) to point to the location of the OpenCV and CUDA builds, too.
Executable: D:/dev/bin
Includes: D:/dev/include
Libraries: D:/dev/lib64
Real Dataset (144 image pairs with groundtruth depth): Dataset
Folder Structure:
- calib - intrinsic camera matrix K, and transformation R, t between first->second image frames in OpenCV format .xml
- image_02/data - first RGB image frame
- image_03/data - second RGB image frame
- proj_depth/groundtrutn - contains groundtruth depth for image_02
- calibrationVector - calibration vector in .flo format
- translationVector - trajectory field in .flo format
- result_ours - our results for easy comparison (with visualization of disparity error)
INTEL Realsense T265: Video 01 Video 04 Video 07 Video 16 Video 19 Video 20 Video 21
*CMake
This project is licensed under the MIT license
Menandro Roxas, 3D Vision Laboratory (Oishi Laboratory), Institute of Industrial Science, The University of Tokyo