This repository contains code and instructions to build understanding of ROS2 fundamentals.
mkdir ros2_simWS
cd ros2_simWS
mkdir src
colcon build
cd ~
nano .bashrc
Add following lines
source /opt/ros/foxy/setup.bash
source /home/mda5si/ros2_simWS/install/setup.bash
git clone
In this activity we will use turtlesim simulator and another node that will control
-
Launch the turtlesim node
ros2 run turtlesim turtlesim_node -
Lunch the node to control turtle in turtle-sim
ros2 run turtlesim turtle_teleop_key
Keep the terminal in forground where the turtle_teleop_key node is running. You will be able to move the turtle.
The turtlesim_node can also be controlled by nodes written in python. In order to write it. We need to know the understand which topic is responsible for messages related to movement of turtle and the format in which it takes the data.
-
List available nodes
ros2 node list -
List available topics
ros2 topic list -
Investigate a particular topic
ros2 topic info <Topic name> ros2 topic info /turtle1/cmd_vel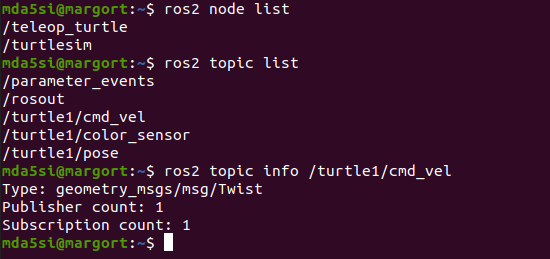

The topic which is associated with the movement of turtle in turtle sim is cmd_vel. As can be seen in the picture above the Type of this topics is Twist. In order to understand the data composition of Twist type. We investigate further.
-
Investigate the composition of Twist.
By experience we know that twist is part of geometry_msg.
ros2 interface show geometry_msgs/msg/Twist ros2 interface proto geometry_msgs/msg/Twist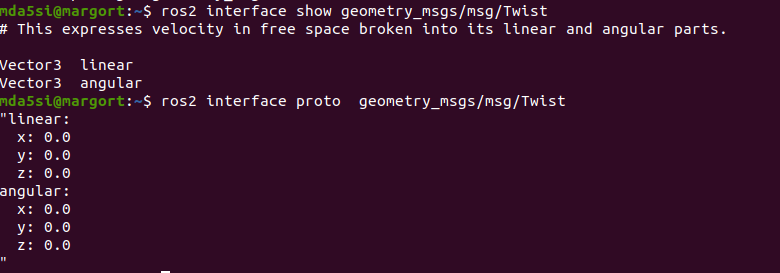
Now that we know about the topic responsible for controling the turtle and the format in which we need to supply data. Lets publish data on the node using command line.
-
Publish data using Command line
ros2 topic pub /turtle1/cmd_vel geometry_msgs/msg/Twist "{linear:{x: 4.0, y: 0.0,z: 0.0}, angular:{x: 0.0, y: 0.0, z: 1.0}}"

-
Create Package
ros2 pkg create turtlecontrol --build-type ament-python --dependencies rclpy
-
Create file for node source code and write code.
touch twistControl.py -
Make code executable if you want to run node directly from the python file
chmod +x twistControl.py -
Run node You can run the node directly from the python file or you can create a executable. To run the node directly do
./twistControl.py -
Create an Executable. If you want to have a executable that you can run from anywhere using ros2 run < executable name>
In the setup.pkg file. Add following
"turtle_twist = turtlecontrol.twistControl:main"turtle_twist will be the name of the executable.
-
Build the executable
colcon build --packages-select turtlecontrolor
colcon build --packages-select turtlecontrol --symlink-installThis command saves us the hassle of building again when we make change to our python code for the node. But for this to work it is necessary to have twistControl.py should be make executable using chmod +x twistControl.py
The executable will be called "turtle_twist". The location of installation is mentioned in setup.cfg.
-
Run the executable
ros2 run turtlecontrol turtle_twist.
-
Create Package
ros2 pkg create turtlecontrolcpp --build-type ament_cmake --dependencies rclcpp -
Create file for node source code and add code
touch twistControl.cpp -
Execute the node
ro2 run turtlecontrolcpp twistCPP
ros2 topic hz <topic name>
ros2 topic hz /turtle1_cmd_vel
ros2 topic bw <topic name>
ros2 topic bw /turtle1/cmd_vel
ros2 run <package name><executablename> --rps-args --remap __node:=<newexecutablename>
A service is a request/response pattern where a client makes a request to a node providing the service and the service processes the request and generates a response. You generally don’t want to use a service for continuous calls; topics or even actions would be better suited.
ros2 list service list
ros2 list service list -t (Also tells the type)

If you donot use the -t argument you can get the type of the service using
ros2 service type <name of service>
ros2 service type /spawn
ros2 interface show turtlesim/srv/Spawn
ros2 interfac proto turtlesim/srv/Spawn

ros2 service call <service_name> <service_type> <arguments>
ros2 service call /spawn turtlesim/srv/Spawn "{x: 4, y: 5, theta: 0.5, name: ''}"
The same node without any change in the code can be run with a different name or in other words a new instance of same node can be started This may be required to change the topic names on which they are publishing or subscribing. Also keep in mind always change the name of node when creating a new node otherwise if there are two nodes with same name it can cause unintended behaviour.
We just spawn a new turtle in previous section. This new turtle can be controlled by sending command on /turtle2/cmd_vel. But our turtle_teleop_key node by default publishes on /turtle1/cmd_vel. So we have to start a new instance of /teleop_turtle node whose name will be /telop_turtle_new and will publish on /turtle2/cmd_vel
ros2 run turtlesim turtle_teleop_key --ros-args --remap /turtle1/cmd_vel:=/turtle2/cmd_vel --remap __node:=teleop_turtle_new
In order for two nodes to commmunicate with each other they should agree on
- Topic Name(ex:/number_count , /turtle1/cmd_vel)
- Msg Defination (example_interfaces/msg/Int64 , geometry_msgs/msg/Twist)
Similarly for Services
- Name of Service (ex: /reset_number_counter , /spawn , /turtle1/set_pen)
- Msg Definition: There are usually 2 parts to it one is structure of request and otherone below the dotted line is response
| /rest | /spawn | /set_pen |
|---|---|---|
| bool data | float32 x | uint8 r |
| float32 x | uint8 g | |
| float32 theta | uint8 b | |
| uint8 width | ||
| uint8 off | ||
| ------------- | ------------- | ----------- |
| bool success | string name |
-
Create a package. By default creates a C package
ros2 pkg create rex_interfaces
rm -rf includes
rm -rf src
mkdir msg
<build_depend> rosidl_default_generators</build_depend>
<exec_depend>rosidl_default_runtime<exec_depend>
<member_of_group>rosidl_interface_packages</member_of_group>
find_package(
rosidl_default_generators REQUIRED)
rosidl_generate_interfaces(${PROJECT_NAME}
"msg/RobotData.msg"
)
-
Download packages
sudo apt-get install ros-foxy-turtle-tf2-py ros-foxy-tf2-tools ros-foxy-tf-transformations -
Another package for euler angles
pip3 install transforms3d -
Launch
ros2 launch turtle_tf2_py turtle_tf2_demo.launch.py-
Packages
sudo apt-get install ros-foxy-teleop-twist-keyboard -
Run the package
ros2 run teleop_twist_keyboard teleop_twist_keyboard
-