Contrastive Multiview Coding
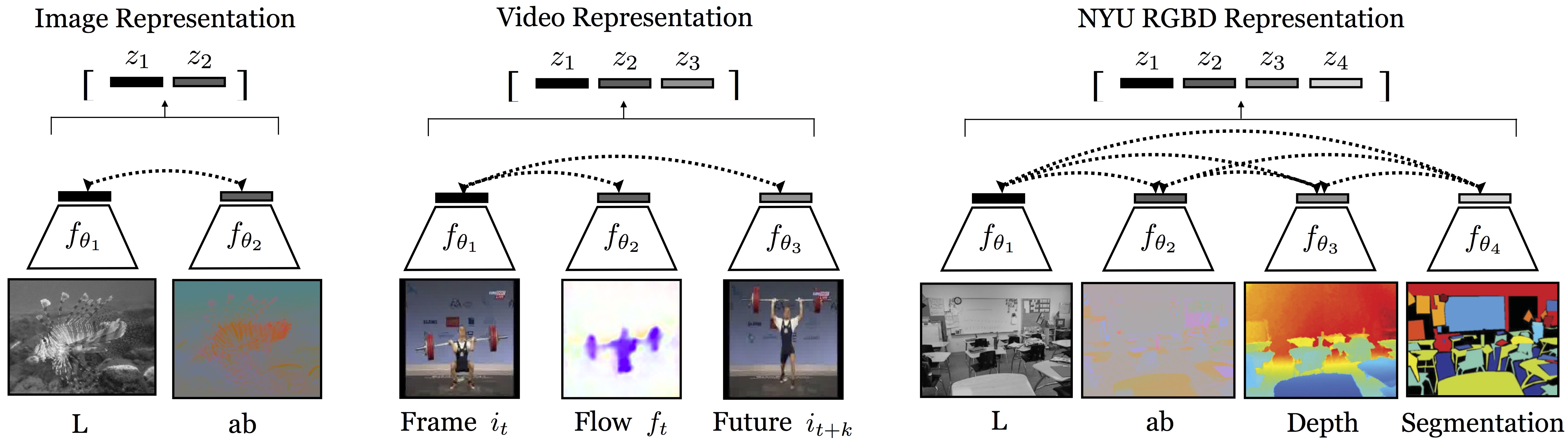
This repo covers the implementation for CMC, which learns representations from multiview data in a self-supervised way (by multiview, we mean multiple sensory, multiple modal data, or literally multiple viewpoint data. It's flexible to define what is a "view"):
"Contrastive Multiview Coding" Paper, Project Page.
Highlights
(1) Representation quality as a function of number of contrasted views.
We found that, the more views we train with, the better the representation (of each single view).
(2) Contrastive objective v.s. Predictive objective
We compare the contrastive objective to cross-view prediction, finding an advantage to the contrastive approach.
(3) Unsupervised v.s. Supervised
ResNet-50 trained with our unsupervised CMC objective surpasses supervisedly trained AlexNet on ImageNet classification ( ~63.0% v.s. 59.3%). For this first time on ImageNet classification, unsupervised methods are surpassing the classic supervised-AlexNet proposed in 2012 (CPC++ and DIM++ also achieve this milestone concurrently).
Updates
Aug 20, 2019 - ResNets on ImageNet have been added.
Installation
This repo was tested with Ubuntu 16.04.5 LTS, Python 3.5, PyTorch 0.4.0, and CUDA 9.0. But it should be runnable with recent PyTorch versions >=0.4.0
Note: It seems to us that training with Pytorch version >= 1.0 yields slightly worse results. If you find the similar discrepancy and figure out the problem, please report this since we are trying to fix it as well.
Training AlexNet/ResNets with CMC on ImageNet
Note: For AlexNet, we split across the channel dimension and use each half to encode L and ab. For ResNets, we use a standard ResNet model to encode each view.
NCE flags:
--nce_k: number of negatives to contrast for each positive. Default: 4096--nce_m: the momentum for dynamically updating the memory. Default: 0.5--nce_t: temperature that modulates the distribution. Default: 0.07 for ImageNet, 0.1 for STL-10
Path flags:
--data_folder: specify the ImageNet data folder.--model_path: specify the path to save model.--tb_path: specify where to save tensorboard monitoring events.
Model flag:
--model: specify which model to use, including alexnet, resnet50, and resnet101
An example of command line for training CMC (Default: AlexNet on Single GPU)
CUDA_VISIBLE_DEVICES=0 python train_CMC.py --data_folder path/to/data \
--model_path path/to/save \
--tb_path path/to/tensorboard
Training CMC with ResNets requires at least 4 GPUs with DataParallel, the command of using resnet50 looks like
CUDA_VISIBLE_DEVICES=0,1,2,3 python train_CMC.py --data_folder path/to/data \
--model_path path/to/save \
--tb_path path/to/tensorboard \
--model resnet50 --batch_size 128 --crop_low 0.08
By default, the training scripts will use L and ab as two views to contrast with each other. If you want to specify other image channels as different views, simply modifying the image transform function here and changing the mean and std accordingly should work.
Training Linear Classifier
Path flags:
--data_folder: specify the ImageNet data folder. Should be the same as above.--save_path: specify the path to save the linear classifier.--tb_path: specify where to save tensorboard events monitoring linear classifier training.
Model flag --model is similar as above and should be specified.
Specify the checkpoint that you want to evaluate with --model_path flag, this path should directly point to the .pth file.
This repo provides 3 ways to train the linear classifier: single GPU, data parallel, and distributed data parallel.
(a) single GPU.
An example of command line for evaluating, say ./models/alexnet.pth, should look like:
CUDA_VISIBLE_DEVICES=0 python LinearProbing.py --data_folder path/to/data \
--save_path path/to/save \
--tb_path path/to/tensorboard \
--model_path ./models/alexnet.pth \
--gpu 0 \
--model alexnet --learning_rate 0.1 --layer 5
(b) data parallel.
The command is similar as (a) except for specifying multiple gpus and removing the --gpu 0 flag.
(c) distributed data parallel. This way is typically faster than ordinary data parallel even when using the same number of GPUs on a single node. Therefore, it's recommended if you have extra GPUs. An example of the command line looks like:
CUDA_VISIBLE_DEVICES=0,1,2,3 python LinearProbing.py --data_folder path/to/data \
--save_path path/to/save \
--tb_path path/to/tensorboard \
--model_path ./models/alexnet.pth \
--dist-url 'tcp://127.0.0.1:7788' --dist-backend 'nccl' \
--multiprocessing-distributed --world-size 1 --rank 0 \
--model alexnet --learning_rate 0.1 --layer 5
Note: When training linear classifiers on top of ResNets, it's important to use large learning rate, e.g., 30~50. Specifically, change --model alexnet --learning_rate 0.1 --layer 5 to --model resnet50 --learning_rate 30 --layer 6.
Citation
If you find this repo useful for your research, please consider citing the paper
@article{tian2019contrastive,
title={Contrastive Multiview Coding},
author={Tian, Yonglong and Krishnan, Dilip and Isola, Phillip},
journal={arXiv preprint arXiv:1906.05849},
year={2019}
}
For any questions, please contact Yonglong Tian (yonglong@mit.edu).
Acknowledgements
Part of this code is inspired by Zhirong Wu's unsupervised learning algorithm lemniscate.