用来记录学习《自己动手写CPU》的过程。
- ToolKit 中主要包括编译 MIPS 指令的文件。
-
Step1:首先需要将 mips-4.3-221-mips-sde-elf-i686-pc-linux-gnu.tar.bz2 文件解压到 /opt/ 中。

-
Step2:之后打开用户主目录 Home 文件夹,通过 ls -a 指令找到隐藏的 .bashrc 文件,使用 gedit 编辑这个文件。

-
Step3:在此文件的最后加入 PATH 的设置。

-
Step4:重新启动 Ubuntu 系统。重启后,打开终端,在其中输入 mips-sde-elf-,然后按两次 Tab 键,会列出刚刚安装的针对 MIPS 平台的所有编译工具,如下图所示,表示 GNU 工具链安装成功。

-
Step5:每次通过 Makefile 完成对 MIPS 指令的编译。Makefile 主要依赖如下的几个文件。
- inst_rom.S: 这里面包括 MIPS 用到的汇编指令。下面给一个示例:
.org 0x0 // 指示程序从地址 0x0 开始 .global _start // 定义一个全局符号 _start .set noat // 允许自由使用寄存器 $1 _start: ori $1, $0, 0x1100 ori $1, $1, 0x0020 ori $1, $1, 0x4400 ori $1, $1, 0x0044 - ram.ld: 连接描述脚本。
- Bin2Mem.exe: 由 Bin2Mem.c 文件通过
gcc ./Bin2Mem.c -o Bin2Mem编译生成,需要注意的是在生成 Bin2Mem.exe 文件后要赋予其权限,chmod 777 Bin2Mem.exe否则后面会报错。
- inst_rom.S: 这里面包括 MIPS 用到的汇编指令。下面给一个示例:
-
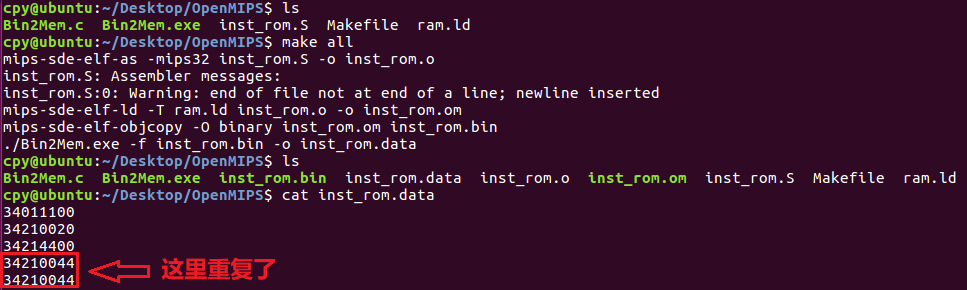
Step6:最终生成 inst_rom.data 文件,可以在 Vivado 中通过 readmemh 完成 rom 的初始化。需要注意的是生成的 inst_rom.data 最后一条指令会重复,因此在进行仿真的过程中需要将最后重复的这条指令删去。
-





- Chapter4:第一条指令 ori 的实现。
- 本章通过实现指令 ori,搭建了一个原始的五级流水线结构,这也是 OpenMIPS 的核心。
- 实现了一个用于测试的最小 SOPC,仅仅包括处理器 OpenMIPS、指令存储器 ROM。
- 文件结构示例:
- Data: 用来存放 rom 初始化的数据文件。
- inst_rom.data
- Include:用来存放 openmips 用到的头文件。
- define.v
- RTL:用来存放 openmips 用到的 RTL 文件。
- ex.v
- ex_mem.v
- id.v
- id_ex.v
- if_id.v
- inst_rom.v
- mem.v
- mem_wb.v
- openmips.v
- openmips_min_sopc.v
- pc_reg.v
- regfile.v
- Sim:用来存放 openmips 用到的仿真文件。
- openmips_min_sopc_tb.v
- Picture:用来存放说明文件中用到的图片。
- Data: 用来存放 rom 初始化的数据文件。
- Chapter5:逻辑、移位操作与空指令的实现。
- 本章首先分析了流水线中存在的数据相关问题,然后使用数据前推的方法解决了数据相关问题,随后修改 OpenMIPS,实现了对逻辑、移位操作和空指令的支持,主要修改的是译码阶段的 ID 模块、执行阶段的 EX 模块。其中,在 ID 模块添加对新指令的译码,在 EX 模块添加对新的运算类型的支持。
- 主要实现的指令如下:
- 逻辑操作指令:and, andi, or, ori, xor, xori, nor, lui。
- 移位操作指令:sll, sllv, sra, srav, srl, srlv。
- 空指令:nop, ssnop, 需要注意的是 MIPS 中还定义了 sync, pref(这个指令用 mips 工具包编译会报错,不知道为啥) 这两个指令,但是因为在 OpenMIPS 没有用到,因此也归为空指令一类。
- Chapter6:移动操作指令的实现。
- 本章实现移动操作指令,首先说明移动操作指令涉及对特殊寄存器 HI、LO 的读/写操作,因此实现了这两个特殊寄存器。同样地采用数据前推的方法解决了数据相关问题,修改 OpenMIPS系统结构图实现了对移动操作指令的支持,主要修改的是译码阶段的 ID 模块、执行阶段的 EX 模块。其中,在 ID 模块添加对新指令的译码,在 EX 模块添加对新的运算类型的支持。
- 主要实现的指令如下:
- 移动操作指令:movn, movz, mfhi, mthi, mflo, mtlo。