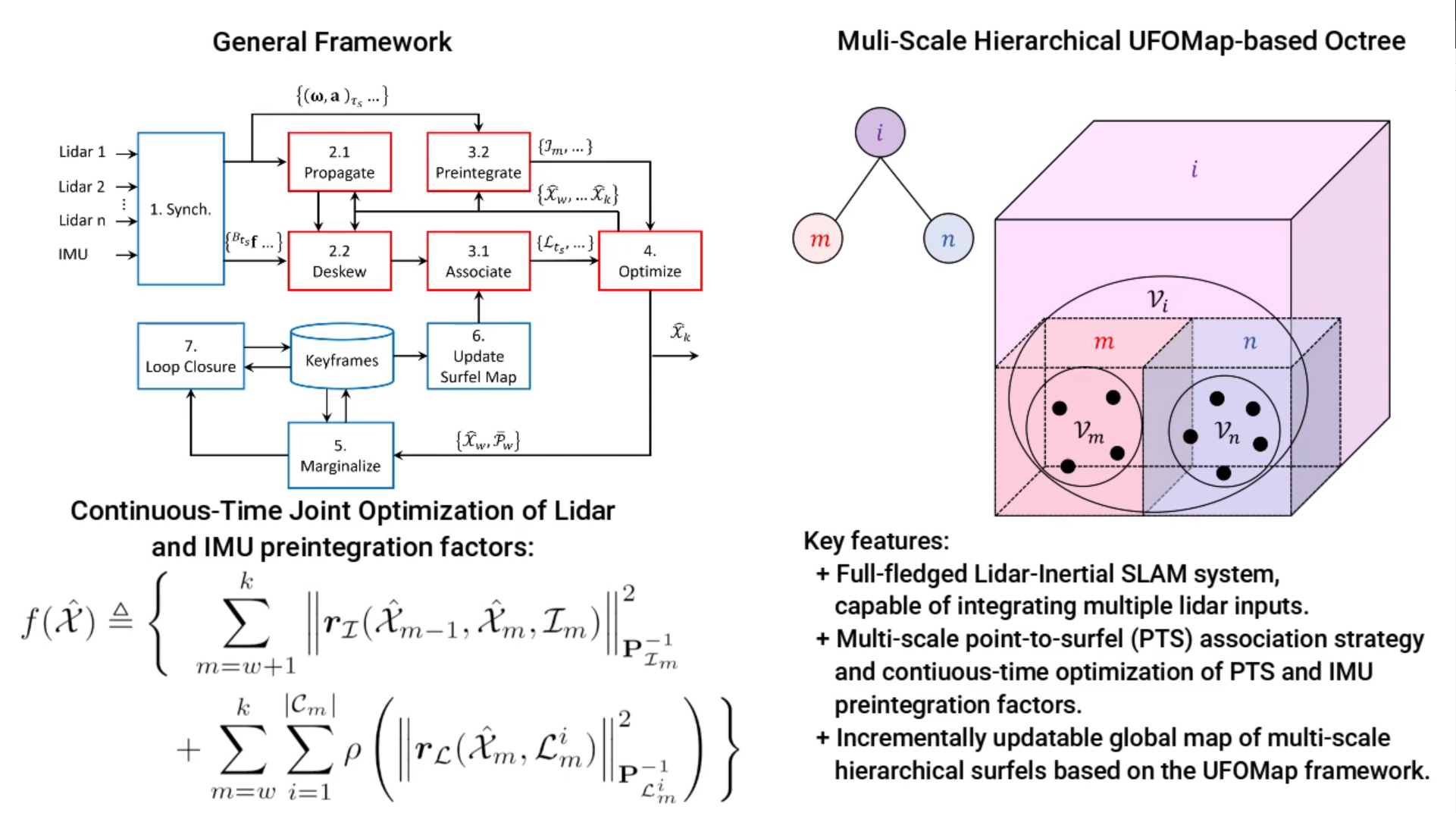
SLICT: Multi-Input, Multi-Scale, Efficient, Surfel-Based, Lidar-Inertial Continuous-Time Odometry and Mapping, with Internal Association
Note: This is an actively developed repo. The stable versions are listed at https://github.com/brytsknguyen/slict/tags.
The details of SLICT are presented in two RA-L papers. Please cite these works if you find SLICT useful:
@article{nguyen2023slict,
title = {SLICT: Multi-input Multi-scale Surfel-Based Lidar-Inertial Continuous-Time Odometry and Mapping},
author = {Nguyen, Thien-Minh and Duberg, Daniel and Jensfelt, Patric and Yuan, Shenghai and Xie, Lihua},
journal = {IEEE Robotics and Automation Letters},
volume = {8},
number = {4},
pages = {2102--2109},
year = {2023},
publisher = {IEEE}
}
@article{nguyen2024eigen,
title = {Eigen Is All You Need: Efficient Lidar-Inertial Continuous-Time Odometry With Internal Association},
author = {Nguyen, Thien-Minh and Xu, Xinhang and Jin, Tongxing and Yang, Yizhuo and Li, Jianping and Yuan, Shenghai and Xie, Lihua},
journal = {IEEE Robotics and Automation Letters},
year = {2024},
volume = {9},
number = {6},
pages = {5330-5337},
doi={10.1109/LRA.2024.3391049}
}
(Please checkout the tag slict.1.0)
Upgrades to using B-spline for trajectory representation, knot length as small as 0.01s, with an efficient solver that ensures real-time performance. More details can be find at our RA-L paper.
The software was developed on the following dependencies. Ubuntu 20.04 and ROS Noetic is a must for compiling SLICT due to UFOMap's minimum requirement. However a docker can be used to run SLICT with older OS versions. Please find the instructions below.
-
Ubuntu 20.04 with ROS Noetic
-
Ceres 2.1.0 (or older, if you use later versions you may encounter this error)
git clone https://ceres-solver.googlesource.com/ceres-solver cd ceres-solver && git fetch --all --tags git checkout tags/2.1.0 mkdir build && cd build cmake .. && make -j$(nproc) sudo make install
-
One more package:
sudo apt install ros-$ROS_DISTRO-tf2-sensor-msgs
SLICT uses UFOMap for global map management. It also supports epicyclic lidar (Livox). Thus, three packages need to be included in the catkin workspace:
- SLICT
- UFOMap (devel_surfel)
- To compile the package for use with livox lidars (avia, mid-70, mid 360), you need to install Livox ROS driver (forked) and Livox ROS driver2 (forked) (you need to install LIVOX-SDK and LIVOX-SDK2)
Please install all dependencies first. Afterwards, create a ros workspace, clone the packages to the workspace, and build by catkin build or catkin_make, for e.g.:
mkdir -p slict_ws/src
cd slict_ws/src
git clone https://github.com/brytsknguyen/slict
git clone https://github.com/brytsknguyen/ufomap && cd ufomap && git checkout devel_surfel && cd ..
git clone https://github.com/brytsknguyen/livox_ros_driver
git clone https://github.com/brytsknguyen/livox_ros_driver2
cd .. && catkin build
The launch files for NTU VIRAL, Newer College, MCD VIRAL, and FusionPortable are provided under launch
Please raise an issue if you encounter any problem.
After build step success, run following commands:
source devel/setup.zsh # Or make this command automatic by: echo "source /home/$USER/slict_ws/devel/setup.bash" >> ~/.bashrc"
roslaunch slict run_mcdviral.launch bag_file:=${PATH_TO_THE_MCD_SEQ}
# Example: roslaunch slict run_mcdviral.launch bag_file:=/media/tmn/mySataSSD1/DATASETS/MCDVIRAL/PublishedSequences/ntu_day_01/*.bagYou can also modify the path
SLICT was developed with intention to keep things educational.The whole backbone of the program is in the following steps:

Parts of SLICT were used in the course "Optimization-Based Localization and Mapping" at Division of Robotics, Perception and Learning, KTH Royal Institute of Technology (http://kth-rpl.se/). The course is open to public at the following OBLAM Course Site.

