相机参数相关脚本
[toc]
一.生成及可视化
使用colmap生成相机参数。使用matplotlib可视化。colmap调用部分使用 LLFF 的部分代码。
运行说明
- 在系统中安装好colmap3.6以上版本并配置好环境变量。
- 在python环境下,使用
python run.py --mode scene --scene ./vasedeck即可生成vasedeck中images文件夹下照片的相机参数,并对所有照片对应相机的位置和方向可视化。如果目录下已经存在相机参数,则只做可视化。 - 输出(IDE为PyCharm,可视化结果可交互)


备注
- 示例实验使用的数据集从这里 下载(nerf_real_360.zip里面的vasedeck)。也可以使用摄影设备拍摄自己的数据集。
- 根据数据集不同,colmap不一定能生成全部照片的相机外参,或根本无法生成。本程序会输出无法生成外参的照片名,并自动给中止程序。
- 一个奇怪的问题:配置好colmap环境变量后,在Anaconda的baseu环境下,在PyCharm里运行找不到它。切换到Anaconda里其它环境就好了。
- --npy --npys选项用于对 NeRF 里load_llff.py里加载的poses可视化。
- --json用于对ingp里存放相机参数的json进行可视化。
二.生成新视角
用于根据输入的相机参数生成均匀散布在球面上的新视角。具体见poses_utils.py的generate_poses函数。
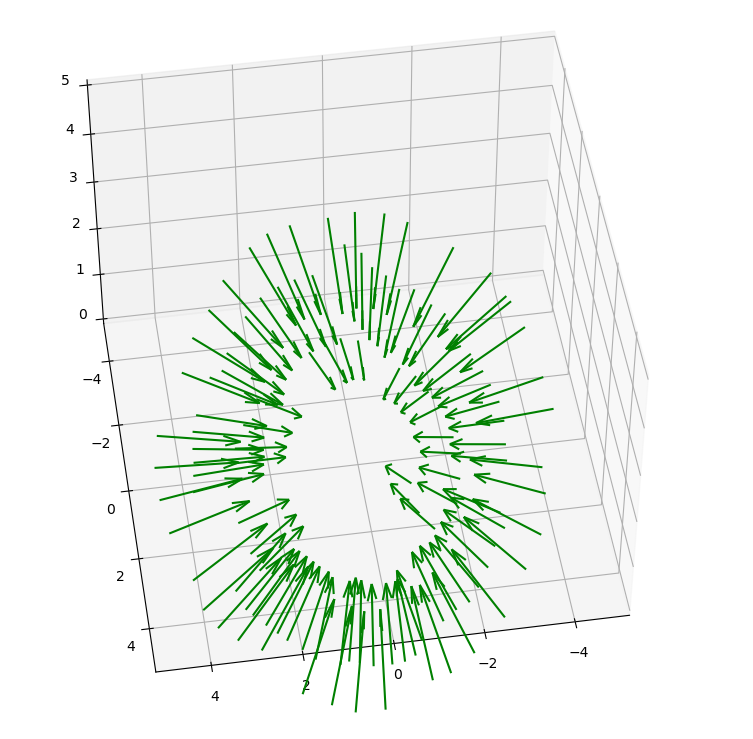
如图,绿色是输入视角,红色是选定的基准视角,蓝色是新视角。新视角散布在以基准视角为半径的球面上,两条旋转轴分别是z轴、同时与z轴和基准视角垂直的轴。
