Self-Driving Car Engineer Nanodegree Program
-
The Model:
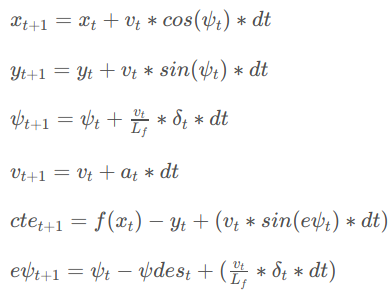
The model, as shown on the following image has:
- Input parameters: [x,y,ψ,v,cte,eψ] = x, y, psi, velocity, cross-track-error en psi-error
- Output parameters:[δ,a] = acceleration and steering delta
-
Timestep Length and Elapsed Duration (N & dt) As values, I used the default values. This means that N=10, and dt=0.1. This means that the controller uses a (10 * 0.1s = 1s) timeframe to find a proper traject, and correct for errors. An important formula here is T=N*dt, in which T is the prediction horizon over which future predictions are made. T should be a few seconds at most. Beyond that horizon, the environment will change enough that it won't make sense to predict any further in the future. Choosing high value for N, results in a (very) low value for dt. Lower values of dt result in more frequent actuations, which make more accurate appromiations to a continues reference trajectory. So the lower dt, the better. But, as N gets larger, the length of the number of variables to optimize for the MPC increases significantly. And this has a huge impact on the computational cost.
So:- the higher N, the lower dt: more accurate approximation, but computationally expensive
- the lower N, the higher dt: less accurate approximation, but computationally less expensive
-
Polynomial Fitting and MPC Preprocessing First the waypoints are transformed from world coordinates into car coordinates. This allows for easier calculation afterwards. Next the coefficients are calculated and the state vector is created. As we're in car coordinate system, the first three parameters are zero. Next the MPC is used to calculate for
- steering angle
- throttle value
- predicted points (those are shown in green in the simulator) Afterwards, points are calculated to show the 'ideal' way, where the cte is as low as possible (the yellow line in the simulator).
-
Model Predictive Control with Latency Latency of 100ms is introduced. This means that after values have been calculated, a delay of 100ms is introduced before those values are sent back to the simulator. We take thise value into account when recalculating the model.

I've used the steps described below to install all required libraries, but:
- I had to use Ipopt v3.12.7; other versions were not working
- I used the Eclipse cmake generator with debug mode active:
cmake -G"Eclipse CDT4" -DCMAKE_BUILD_TYPE=Debug - I have to start the simulator using the following command, not to have decimal conversion issues:
LC_ALL=C ./term2_sim.x86_64
- cmake >= 3.5
- All OSes: click here for installation instructions
- make >= 4.1(mac, linux), 3.81(Windows)
- Linux: make is installed by default on most Linux distros
- Mac: install Xcode command line tools to get make
- Windows: Click here for installation instructions
- gcc/g++ >= 5.4
- Linux: gcc / g++ is installed by default on most Linux distros
- Mac: same deal as make - [install Xcode command line tools]((https://developer.apple.com/xcode/features/)
- Windows: recommend using MinGW
- uWebSockets
- Run either
install-mac.shorinstall-ubuntu.sh. - If you install from source, checkout to commit
e94b6e1, i.e.Some function signatures have changed in v0.14.x. See this PR for more details.git clone https://github.com/uWebSockets/uWebSockets cd uWebSockets git checkout e94b6e1
- Run either
- Fortran Compiler
- Mac:
brew install gcc(might not be required) - Linux:
sudo apt-get install gfortran. Additionall you have also have to install gcc and g++,sudo apt-get install gcc g++. Look in this Dockerfile for more info.
- Mac:
- Ipopt
- If challenges to installation are encountered (install script fails). Please review this thread for tips on installing Ipopt.
- Mac:
brew install ipopt- Some Mac users have experienced the following error:
This error has been resolved by updrading ipopt withListening to port 4567 Connected!!! mpc(4561,0x7ffff1eed3c0) malloc: *** error for object 0x7f911e007600: incorrect checksum for freed object - object was probably modified after being freed. *** set a breakpoint in malloc_error_break to debugbrew upgrade ipopt --with-openblasper this forum post. - Linux
- You will need a version of Ipopt 3.12.1 or higher. The version available through
apt-getis 3.11.x. If you can get that version to work great but if not there's a scriptinstall_ipopt.shthat will install Ipopt. You just need to download the source from the Ipopt releases page. - Then call
install_ipopt.shwith the source directory as the first argument, ex:sudo bash install_ipopt.sh Ipopt-3.12.1.
- You will need a version of Ipopt 3.12.1 or higher. The version available through
- Windows: TODO. If you can use the Linux subsystem and follow the Linux instructions.
- CppAD
- Mac:
brew install cppad - Linux
sudo apt-get install cppador equivalent. - Windows: TODO. If you can use the Linux subsystem and follow the Linux instructions.
- Mac:
- Eigen. This is already part of the repo so you shouldn't have to worry about it.
- Simulator. You can download these from the releases tab.
- Not a dependency but read the DATA.md for a description of the data sent back from the simulator.
- Clone this repo.
- Make a build directory:
mkdir build && cd build - Compile:
cmake .. && make - Run it:
./mpc.
- It's recommended to test the MPC on basic examples to see if your implementation behaves as desired. One possible example is the vehicle starting offset of a straight line (reference). If the MPC implementation is correct, after some number of timesteps (not too many) it should find and track the reference line.
- The
lake_track_waypoints.csvfile has the waypoints of the lake track. You could use this to fit polynomials and points and see of how well your model tracks curve. NOTE: This file might be not completely in sync with the simulator so your solution should NOT depend on it. - For visualization this C++ matplotlib wrapper could be helpful.
We've purposefully kept editor configuration files out of this repo in order to keep it as simple and environment agnostic as possible. However, we recommend using the following settings:
- indent using spaces
- set tab width to 2 spaces (keeps the matrices in source code aligned)
Please (do your best to) stick to Google's C++ style guide.
Note: regardless of the changes you make, your project must be buildable using cmake and make!
More information is only accessible by people who are already enrolled in Term 2 of CarND. If you are enrolled, see the project page for instructions and the project rubric.
- You don't have to follow this directory structure, but if you do, your work will span all of the .cpp files here. Keep an eye out for TODOs.
Help your fellow students!
We decided to create Makefiles with cmake to keep this project as platform agnostic as possible. Similarly, we omitted IDE profiles in order to we ensure that students don't feel pressured to use one IDE or another.
However! I'd love to help people get up and running with their IDEs of choice. If you've created a profile for an IDE that you think other students would appreciate, we'd love to have you add the requisite profile files and instructions to ide_profiles/. For example if you wanted to add a VS Code profile, you'd add:
- /ide_profiles/vscode/.vscode
- /ide_profiles/vscode/README.md
The README should explain what the profile does, how to take advantage of it, and how to install it.
Frankly, I've never been involved in a project with multiple IDE profiles before. I believe the best way to handle this would be to keep them out of the repo root to avoid clutter. My expectation is that most profiles will include instructions to copy files to a new location to get picked up by the IDE, but that's just a guess.
One last note here: regardless of the IDE used, every submitted project must still be compilable with cmake and make./
A well written README file can enhance your project and portfolio. Develop your abilities to create professional README files by completing this free course.