- This package contains implementations for online-plan synthesis algorithm give a dynamic environment (as the finite transition system) and a potential infeasible Linear temporal logic formula (as the robot’s task). It outputs the predicted trajectories at each time-step that optimize the reward-related objectives and finally fulfill the task maximumly.

- Simulation Video: Simulation video
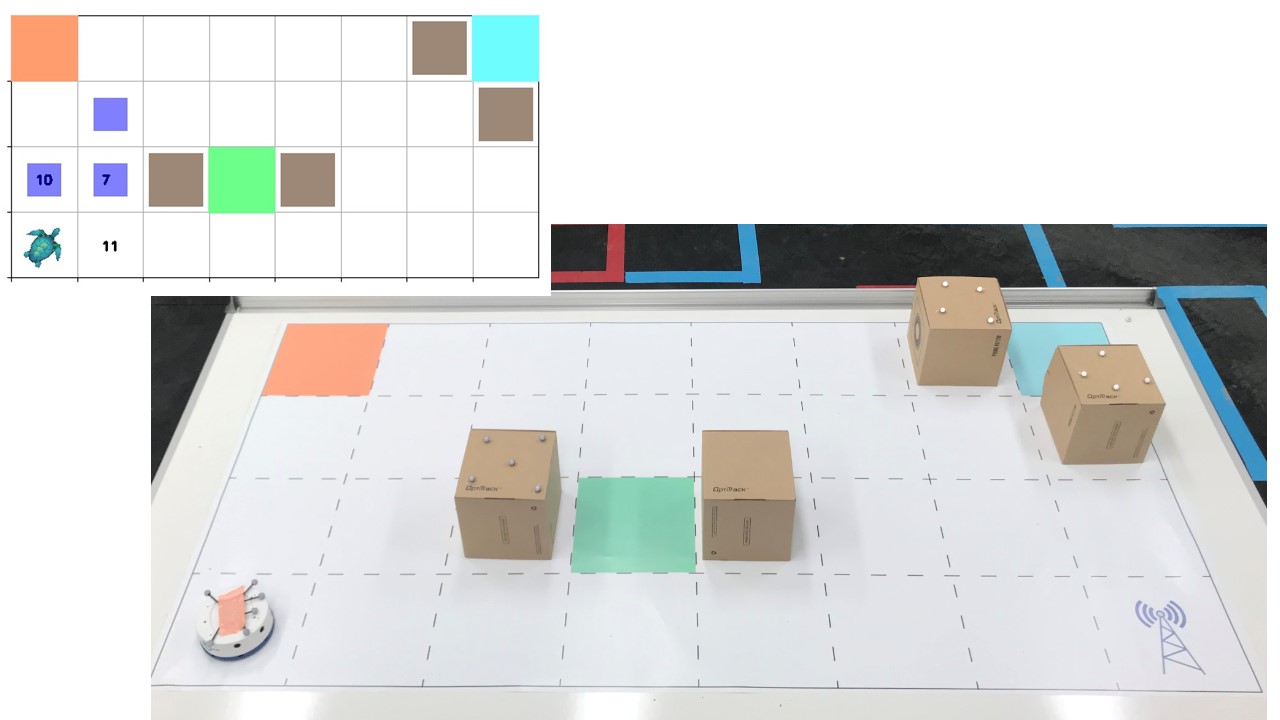
- In the experiment, the neighbor numbers of simulation snapshot provide the time-varying reward
(Here we use the random values) which is our optimization objective.

- Experiment Video: Experiment video
Receding Horizon Control Based Online LTL Motio sPlanning in Partially Infeasible Environments. Mingyu Cai, H. Peng and Z. Kan. Journal of Autonomous Robot.paper link
- Allow both normal and infeasible LTL based product automaton task formulas
- Motion model can be dynamic and initially unknown
- Soft specification is maximumly satisfied.
- Online-Path planning is designed from the model predicted control methodology.
- Collect and transfer the real-time data via Optitrack camera systems
- Allow automatically calibrate the mobile robots to obtain its orientation and dynamics.
- Install python packages like networkx2.0.ply
- Add to your PYTHONPATH, to import it in your own project.
- ltlba_32 and ltlba_64 are executable files complied under Linux, please follow [ltl2ba/README.txt]
- Try path_plan.py
- Add folder to your PYTHONPATH.
- Try Receding_Horizon_Control.py