Progetto di Fisica dei Sistemi Complessi AA 2017-18
Gestisce il servomotore, calcola la distanza attraverso il sensore ad ultrasuoni HC-SR04, invia i dati al radar e punta l'oggetto più vicino rimasto invariato dalle due iterate
foo@bar: ~ $ python client.pyVisualizzazione grafica su radar del funzionamento del sistema
Risoluzioni:
- 1600x820
- 1000x600
foo@bar: ~ $ python radar_[resolution].py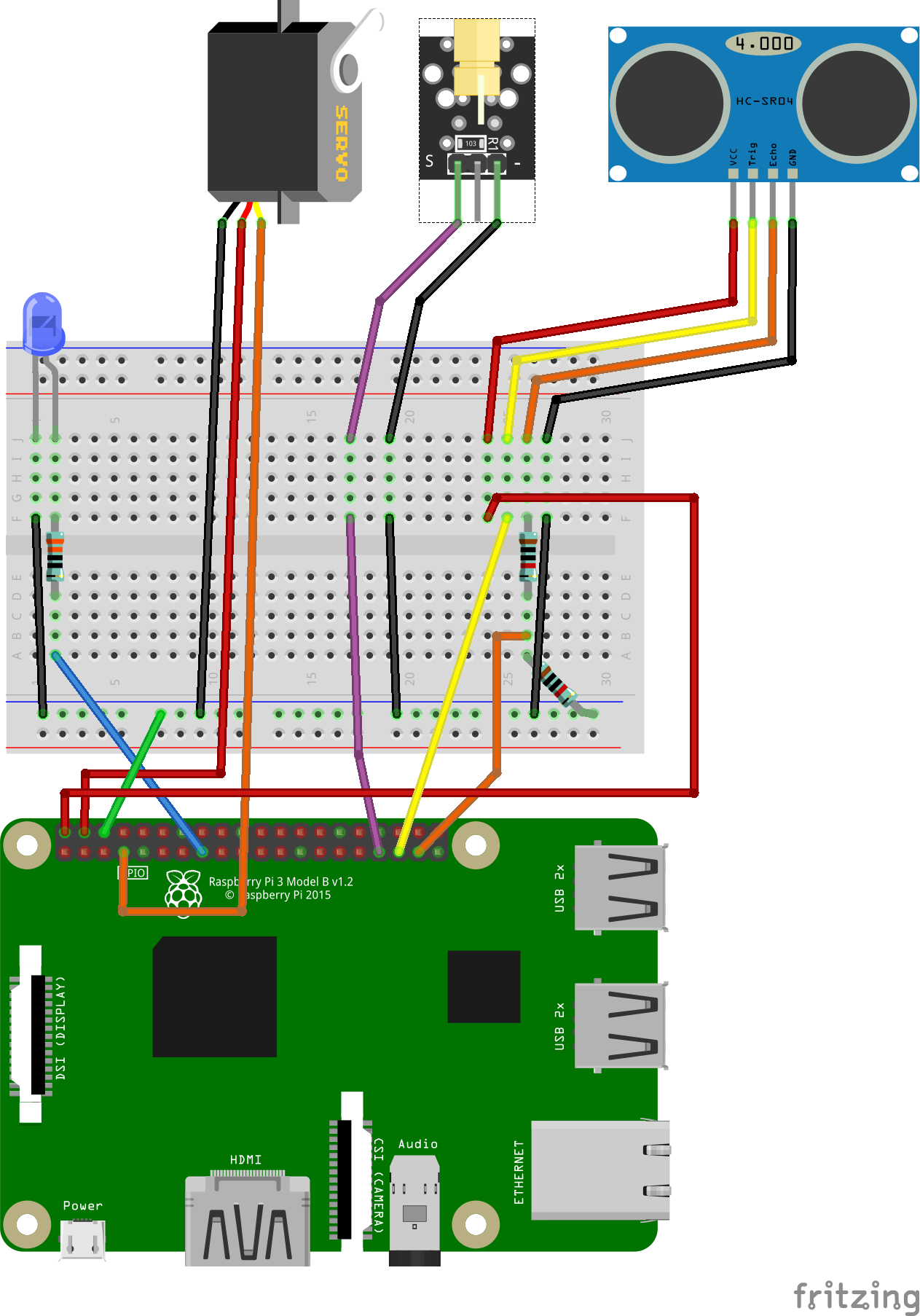
Utilizzato per fare test sull'accuratezza del sensore HC-SR04
foo@bar: ~ $ python client.pyfoo@bar: ~ $ python3 server.py Legno-5Crea un file "Legno-5.csv" nella cartella "Misure"
utilizzato sia dal client che dal server e contiene la porta e l'indizzo ip del server
addr = "0.0.0.0"
port = 1234