Peripersonal Space and Margin of Safety Data
This repository stores data and scripts accompanying a PLoS ONE submission entitled Peripersonal Space and Margin of Safety Around the Body: Learning Visuo-tactile Associations in a Humanoid Robot with Artificial Skin by Alessandro Roncone, Matej Hoffmann, Ugo Pattacini, Luciano Fadiga, and Giorgio Metta.
Requirements
All of the data have been processed and visualized in MatLab, and it is the only requirement for retrieving the data on this repository.
To clone this repository, the user needs a working git client installed on his/her Operating System. If this is not available, it is also possible to download the repository as a .zip file by clicking on the Download ZIP button on the top of this page.
Repository Structure
The repository is divided into three subfolders. Each of them deals with each of the three steps shown in the Results section of the paper. In particular:
1-montecarlo-simulation-of-a-single-taxel-modelstores the "Learning in a single taxel model" data (i.e. the Matlab simulation of a single taxel);2-learning-on-the-iCubdeals with the real learning experiments on the iCub robot. It is subdivided into:- Tactile-motor learning via double touch
- Tactile-visual learning from double touch
- Tactile-visual learning using external objects
3-avoidance-and-reaching-with-arbitrary-body-partscontains data recorded during the last experiments, i.e. exploitation of the previously learned representations for avoidance and reaching with any body part.
Each of these subfolders is provided with a README.md file that explains the content of the folder and how to run the scripts. If the user is not provided with a software able to read and process .md files, it is always possible to view them online (e.g. here), or to rename them as .txt files and open them with standard text editor.
Please note that the subfolder named 0-utils contains only utility functions used by the other subfolders, e.g. the export_fig package to save .eps figures (source code also avalaible at this link). It is not in the scope of this repository to explain the functioning of the files contained in that subfolder.
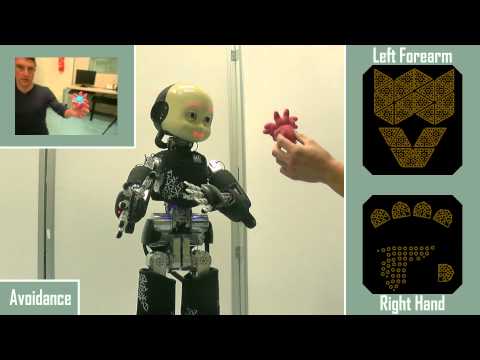
Video
For an illustrative video, click on the image below (you will be redirected to a youtube video). Note that this video was accompanying a previous publication (Roncone, A.; Hoffmann, M.; Pattacini, U. & Metta, G. (2015), Learning peripersonal space representation through artificial skin for avoidance and reaching with whole body surface, in 'Intelligent Robots and Systems (IROS), 2015 IEEE/RSJ International Conference on', pp. 3366-3373.), where a different representation of peripersonal space was used. The scenario was sufficiently similar though.