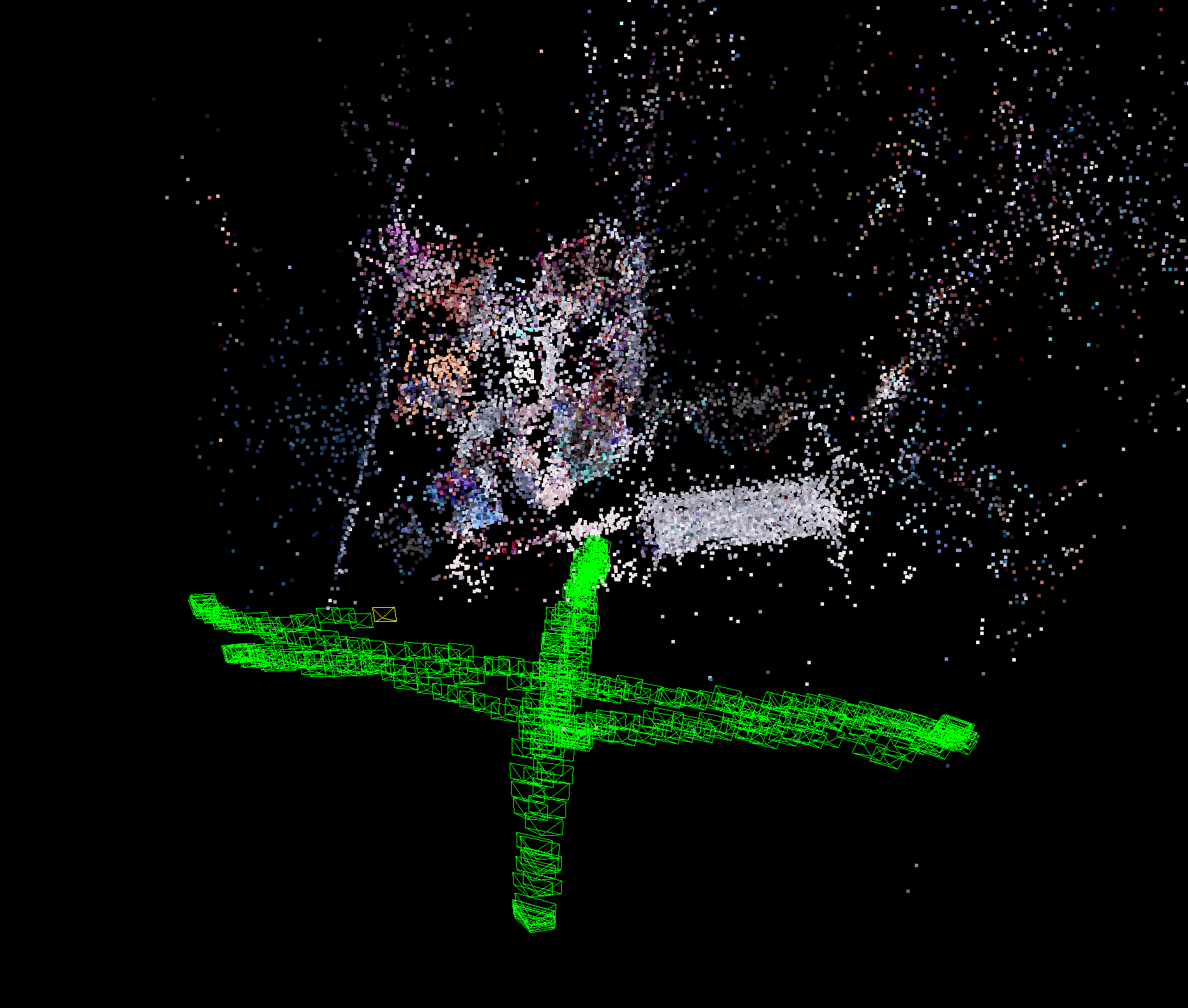
A toy implementation of monocular SLAM written while livestreaming.
https://www.twitch.tv/tomcr00s3
Will be streaming again tomorrow. May 28, 2018
By the end of the day, twitchslam will be decent.
export REVERSE=1 # Hack for reverse video
export F=500 # Focal length (in px)
./slam.py <video.mp4>
# good example
F=525 ./slam.py videos/test_freiburgxyz525.mp4
# kitti example
REVERSE=1 F=984 ./slam.py videos/test_kitti984_reverse.mp4
- Frame -- An image with extracted features
- Point -- A 3-D point in the Map and it's 2-D Frame correspondences
- Map -- A collection of points and frames
- Display2D -- SDL2 display of the current image
- Display3D -- Pangolin display of the current map
- SDL2 for 2-D display
- cv2 for feature extraction
- pangolin for 3-D display
- g2opy for optimization (soon!)
- BUGFIX: Why is window initting small? (fixed? ish, zoom is broken sometimes)
- BUGFIX: Turning doesn't work well (fixed?)
- Stop using essential matrix for pose estimation once you have a track (done)
- Add kinematic model (done)
- Run g2o to only optimize the latest pose (done)
- Add search by projection to refind old map points (done)
- Check if points are in the field of view of the camera (done)
- BUGFIX: Fix moving up! (y axis flipped? nah, it's okay)
- Add loading and saving of map support
- BUGFIX: Improve lockups to happen less
- Improve init to not need REVERSE environment variable
- Add optimizer for F
- Add multiscale feature extractor
- Add Linux libraries and OS check
- Profile and speed up more
- Add automated test for freiburg running on commit
- Check accuracy with ground truth
All my code is MIT licensed. Videos and libraries follow their respective licenses.