This is the code and experimental data behind the paper Tracking Moving Devices with the Cricket Location System (Smith et al, Mobisys 2004).
GPS doesn't work indoors, so in the year 2000 MIT created a project called Cricket. It's a system where a device can send ultrasound and radio signals at the same time, so that any receiver can measure its distance to the sender based on the time difference of arrival of the two signals. (Sound travels about one foot per millisecond, and you can assume here that radio travels instintaneously.)
So the idea is you put a bunch of transmitters at fixed points, and a mobile device can know where it is based on these measurements. OR you can invert the system and have the moving devices send signals which get collected at the fixed nodes. Each of these "architectures" present different challenges and tradeoffs.
I implemented a Kalman filter for each of these architectures and introduced a third architecture: a hybrid system that can switch between the active mobile and passive mobile architectures dynamically to take advantage of both.
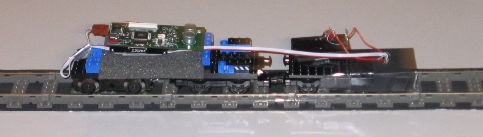
We needed experiments that were repeatable and where there was true-north location knowledge so we could measure the error of our systems. Our team built a train that ran around on a track that had both turns and straight-ways. The true location of the train was measured using a track counter -- an infared optical sensor that watched each track as it went by. (You can see it on the right hand side train car in the picture below.)
There's a lot of work in getting a system like this going. You have to set up your coordinate system, including knowing the location of the fixed nodes, and each train track position. Each day you have to make sure something didn't get moved overnight by the cleaning staff, etc. We ran 18 individual trials while writing this paper. I got pretty good at it!
Here's a video of the train running successfully, and another one of it running unsuccessfully : ).
Notes about these videos:
- The wires hanging down from the ceiling are coming from the fixed nodes on the ceiling, down into computers with serial port interfaces that pipe the data over to the laptop. We took measurements using the wired and with radio-based connections because the RF channel was lossy.
- We ran the train at various speeds. If you download the data (below),
exp1was the first set of experiments we did when submitting the paper, andexp2was the higher quality set of experiments we did for the camera-ready version.exp2went up to higher speeds, on up to where the train would sometimes fall off the track, as in the video above.
The code in this repo doesn't include the mat MATLAB data files that contain the experimental data. You can download a two different versions of the experimental data:
- Barebones Data.zip (< 1 MB)
- Full Code and Data.7z (350 MB compressed, 2 GB uncompressed)
- Everything starts with
p.m(with apologies for the rather undescriptive file name) - You'll find several different parameters for what gets ran.
- For example,
modecan bebatchmodeorsimmode. Batch mode is for processing data as fast as possible, and sim mode is for visualizing positions, measurements, and estimates. - Many models are defined (see
modeltype), as well. - To get started, change the path of the first line of code to reflect the full path to your download of the Full Code and Data file.
- Then, hit
Run!
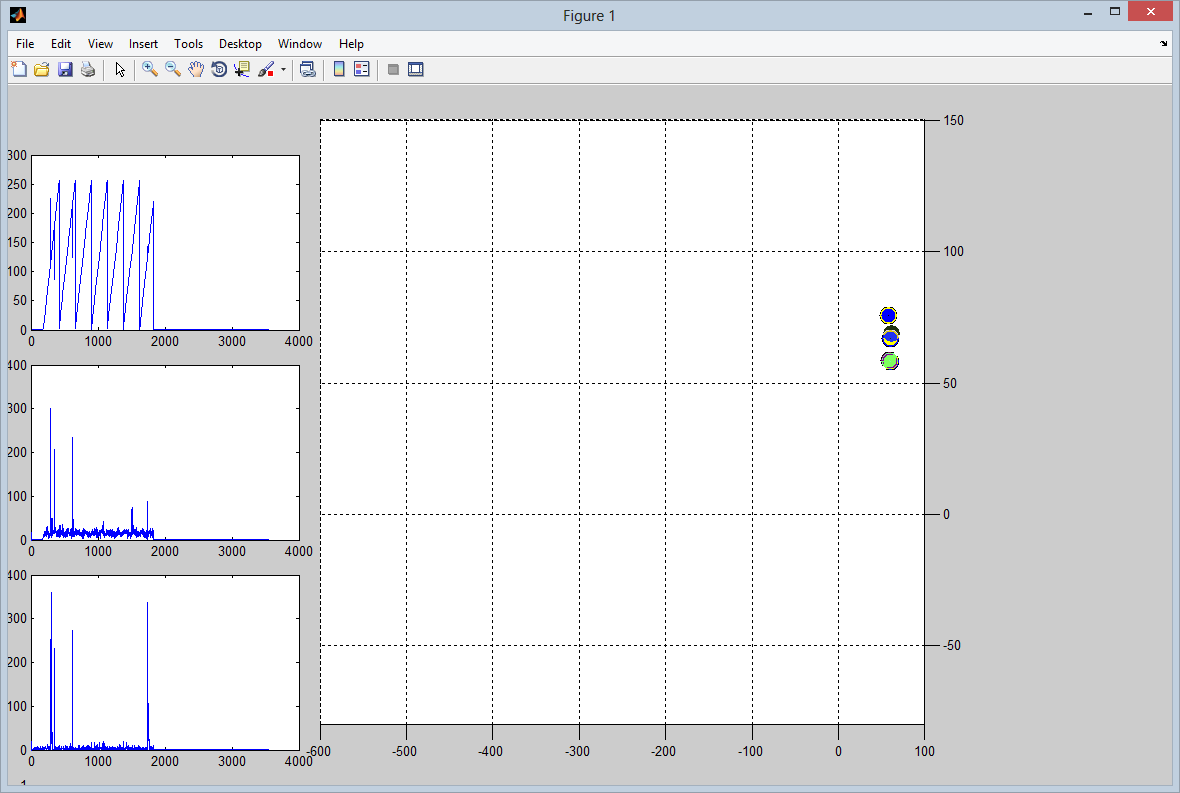
- What you see here is the
simmoderunning through some experimental data. - Peruse
p.mand try tweaking the various options. Hopefully it becomes somewhat self-explanity from there.
- File and function names are based on the fixed nodes.
min_kalman_passiveis the Kalman filter for the passive-fixed, active-mobile architecture, andmin_kalmanis the Kalman filter for the active-fixed, passive-mobile architecture. - Notice that in
min_kalmanwhen the filter reaches a bad state we use multiple distance samples. This is the hybrid data. - All operations are scalars operations. We did this so we could reliably measure the number of multiplications and additions (for figure 19 of the paper), and so we could implement these algorithms in embedded C (which we ended up doing and is in the latest Cricket code).
- We did several different runs to get data, tweaking the experimental setup to get things right. Each run was assigned a letter, starting with
A.expastands for experiment A. The last one I could find reference to was experimentR. Note this is different from the distinction betweenexp1andexp2, explained above; somewhere in-betweenAandRthere was the switchover fromexp1toexp2. - It's been too long for me to remember the exact layout of the code, but some of the things you'll find if you browse it include importing raw experimental data into MATLAB (that's already been done for you), doing grid searches to find the right tuning parameters for the Kalman filters, simulating tracking a moving node in 3D space (this was built before any real-world experiments were done), and I'm sure a bunch of other goodies.
Load up code/exp2/post_everything.mat, as from p.m above. The workspace variable meta_exp_data has all of the measurement data that was used for the second round of experiments.
>> size(meta_exp_data)
ans =
6 3600 6 5The first dimension is the speed of that data, 1-6 ticks. From there, each element in the second dimension is one period of data.
>> squeeze(meta_exp_data(3,768,:,:))
ans =
1.0e+006 *
2.4203 0.0015 0.0002 0.0000 0.0000
2.4203 0.0015 0.0002 0.0000 0.0000
2.4203 0.0015 0.0003 0.0000 0.0000
2.4203 0.0015 0.0004 0.0000 0.0000
2.4203 0.0015 0.0003 0.0000 0.0000
0 0 0 0 0This gives us the 768th record at speed 3. Each row here is a different measurement from a different fixed node, all of which were made at the same time. (All of this is active mobile.) The columns are:
Time, Track Counter Value, Distance (cm), Infra. Node ID, Mobile ID
To get a better look, we can squeeze out the first column (time):
>> squeeze(meta_exp_data(3,768,:,2:5))
ans =
1.0e+003 *
1.4850 0.2408 0.0010 0.0090
1.4850 0.2330 0.0020 0.0090
1.4850 0.2707 0.0030 0.0090
1.4850 0.3535 0.0040 0.0090
1.4850 0.3387 0.0060 0.0090
0 0 0 0The mobile node ID is 9 through all of these experiments, and is stored in the variable MNid. Each fixed node ID is given in FNid, and its coordinates is the corresponding row in the variable c. Therefore, if we do:
>> [FNid, c]
ans =
1.0000 -8.1493 156.4806 226.5947
2.0000 41.2733 46.1848 226.4765
3.0000 -42.8013 -14.2321 227.0080
4.0000 -201.0989 -2.6312 227.5513
5.0000 -281.3157 48.5801 227.2851
6.0000 -197.2754 152.1316 226.8116Then we get the ID in the first column and its corresponding x, y, and z in the third column.
counter_max (256) holds the number of tracks in one orbit, so that we end up mod'ing the counter values with counter_max. pdata holds the coordinates of each track counter value (plus one, since MATLAB doesn't do zero-indexing).
meta_single_exp_data was used to test the passive mobile architecture. One random non-zero entry from every period in meta_exp_data was chosen to represent that period in meta_single_exp_data. Its structure is therefore the same as meta_exp_data, but it does not have the third dimension.