
Thanks to Dall-E for creating the mascot of PeLiCal!
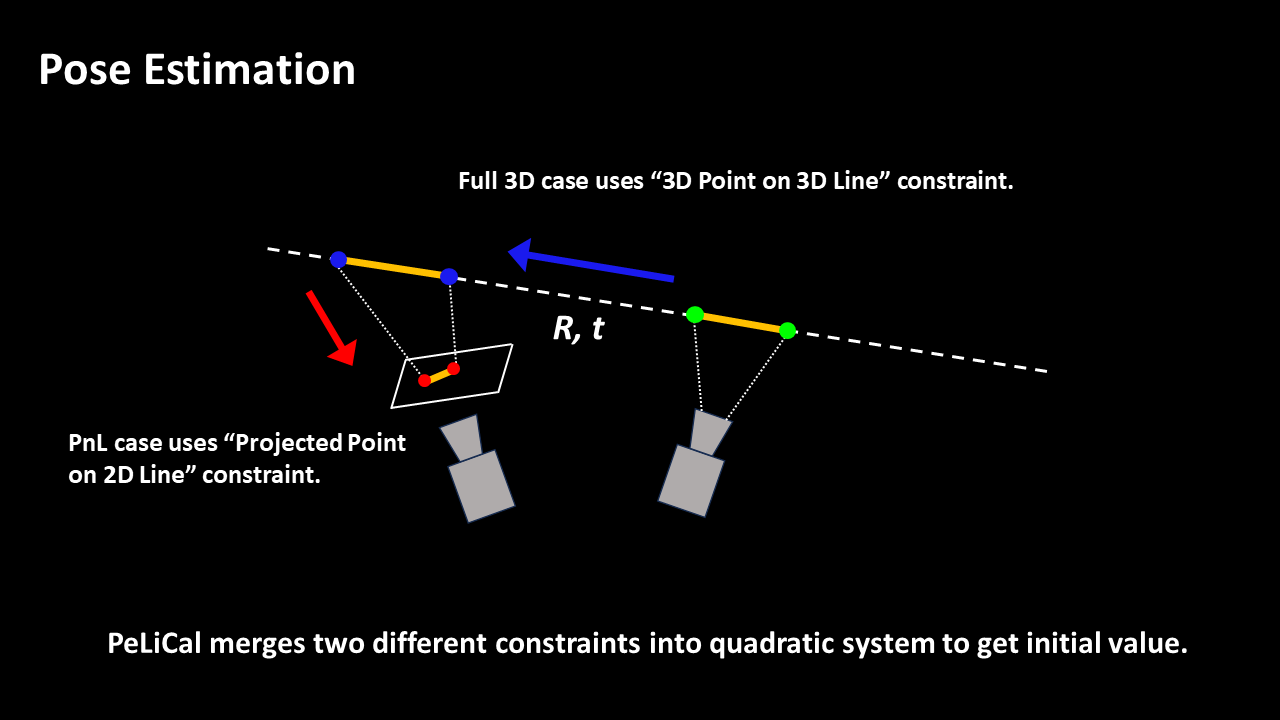
This repository contains the code for PeLiCal, targetless extrinsic calibration for RGB-D cameras with limited co-visibility, which is accepted to ICRA 2024. PeLiCal leverages real-time line features from the environment for estimating the relative pose between cameras. To deal with the challenging configuration of cameras, we derive model-based approach for adding reliable feature and rejecting outliers. Also, we robustly estimate pose by merging two types of constraints into quadratic system.
- 24.04.22 We released an inital version of PeLiCal!
The code requires following dependencies:
- Ubuntu 20.04 and ROS Noetic
- Ceres Solver (2.1.0)
- Eigen3 and Sophus
- GlueStick
- OpenCV4 (4.5.2)
- PoseLib (2.0.0)
- RealSense-ROS1
cd ~/[your ROS Workspace]/src
git clone https://github.com/joomeok/PeLiCal.git
cd ..
catkin build
source devel/setup.bashCreate your own Calibrator.yaml file containing principal information for the cameras under config directory. For example:
image_width: 640
image_height: 480
source_rgb: "/cam_1/color/image_raw"
source_depth: "/cam_1/aligned_depth_to_color/image_raw"
target_rgb: "/cam_2/color/image_raw"
target_depth: "/cam_2/aligned_depth_to_color/image_raw"
voting_eps: 7.0
voting_thresh: 6
minimum_line_num: 15
convergency_cost: 10.0
target_intrinsic:
data: [599.679256, 0.000000, 320.187940, 0.000000, 600.098148, 244.389703,0,0,1]
source_intrinsic:
data: [598.330788, 0.000000, 316.565022,0.000000, 598.405846, 232.152461,0,0,1]
gluestick_root: "/home/jaeho/GlueStick/"Source camera refers to the one positioned at the right side based on the viewing direction, and target camera is positioned at the left side.
First, launch your own data (aligned depth image from RealSense-ROS), for example:
roslaunch realsense2_camera rs_camera.launch align_depth:=true camera:=cam_1 serial_no:=<serial number of the first camera>
roslaunch realsense2_camera rs_camera.launch align_depth:=true camera:=cam_2 serial_no:=<serial number of the second camera>Then, open another terminal and execute following command:
roslaunch pelical calibration.launchWe offer 4 parameters for tuning the performance of the algorithm in accordance with the data.
voting_eps: Counting threshold for convergencevoting_thresh: Convergency threshold for translation candidatesminimum_line_num: Minimum number of lines for terminating the algorithmconvergency_cost: Convergency thershold for terminating the algorithm
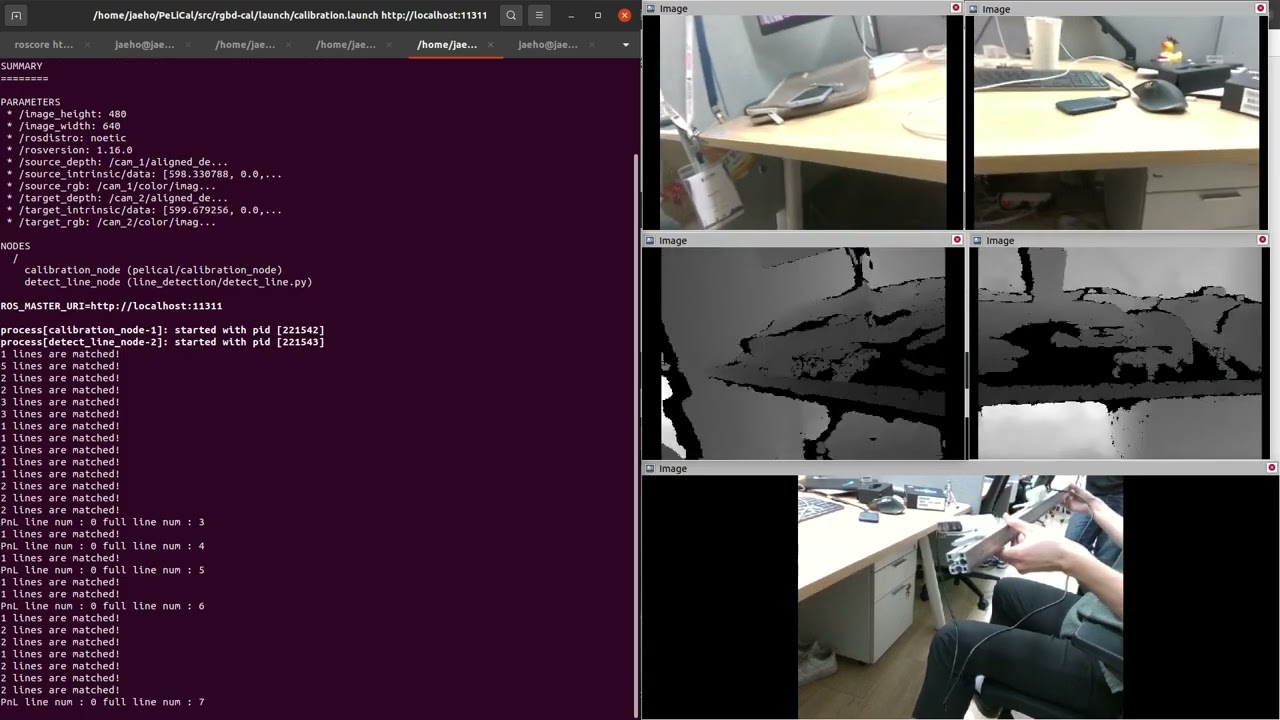
Here are simple demo video for calibrating two RealSense D435i cameras with 60 degree apart.
@INPROCEEDINGS{jhshin-2024-icra,
AUTHOR = { Jaeho Shin and Seungsang Yun and Ayoung Kim },
TITLE = { PeLiCal: Targetless Extrinsic Calibration via Penetrating
Lines for RGB-D Cameras with Limited Co-visibility },
BOOKTITLE = { IEEE International Conference on Robotics and Automation (ICRA) },
YEAR = { 2024 },
MONTH = { May },
ADDRESS = { Yokohama },
}