Motion profile generator
A library which generates a motion profile (trapezoidal or constant) to reach a given setpoint while adhering to maximum velocity and acceleration settings. The generator is able to both calculate a complete path beforehand and generating it on the fly based on the current position and velocity.
Matlab and cpp (Arduino specific) libraries are available. It should be relatively easy to port the cpp version to other platforms.
Features
- On the fly profile generation
- Supports Trapezoidal and Constant motion profiles
Usage
#include "MotionProfile.h"
/**
* Initialization
*
* @param int aVelocityMax maximum velocity (units/s)
* @param int aAccelerationMax maximum acceleration (units/s^2)
* @param short aMethod method of profile generation (1 = trapezoidal)
* @param int aSampleTime sample time (ms)
*/
MotionProfile trapezoidalProfile = new MotionProfile(200, 100, 1, 10);
/**
* Usage
*/
// Update setpoint for profile calculation and retrieve calculated setpoint
float finalSetpoint = 1000;
float setpoint = trapezoidalProfile->update(finalSetpoint)
// Check if profile is finished
if (trapezoidalProfile->getFinished()) {};
// Reset internal state
trapezoidalProfile->reset();Example graphs
Trapezoidal motion profile
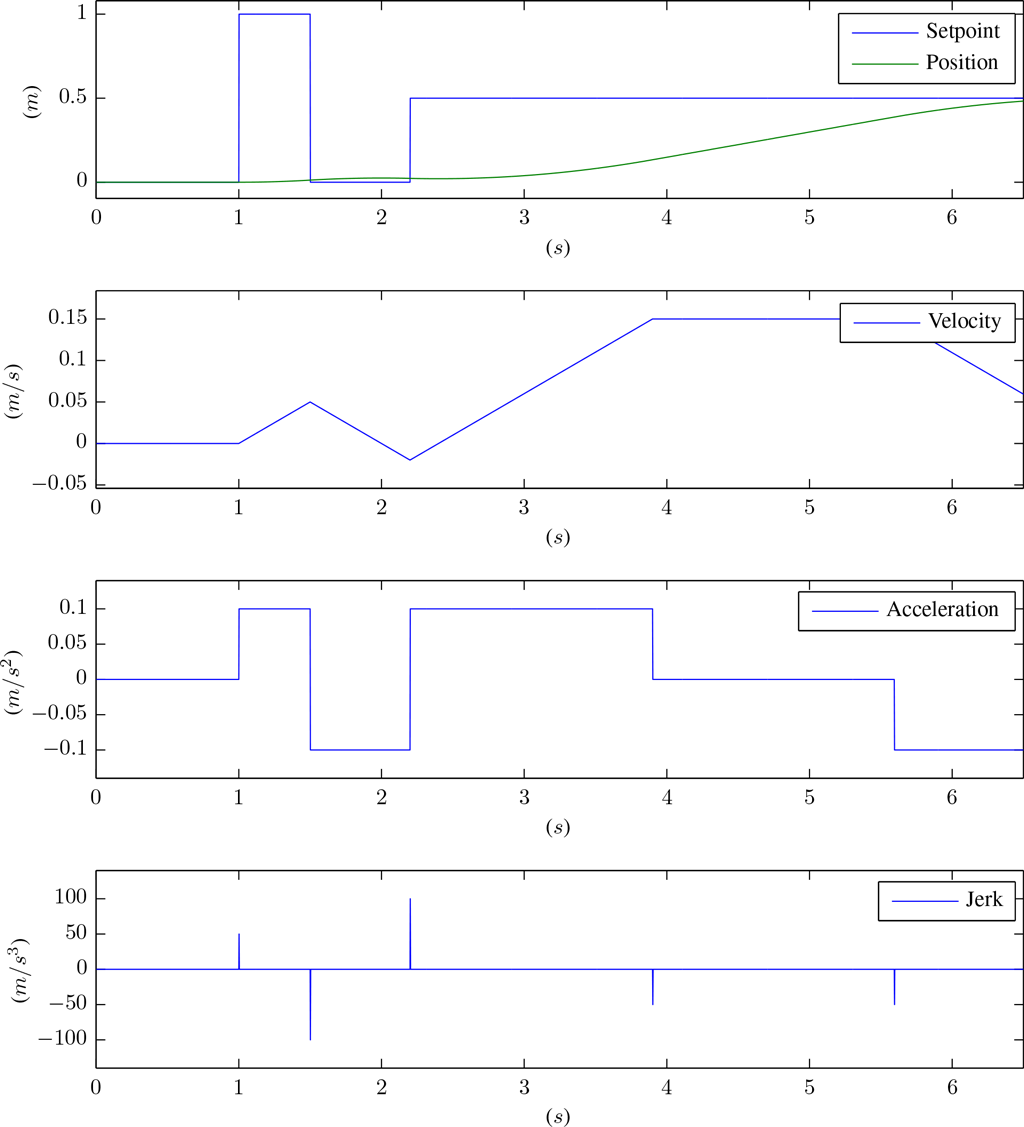 Limit velocity at 0.15 units/s and acceleration at 0.1 units/s^2.
Limit velocity at 0.15 units/s and acceleration at 0.1 units/s^2.
Constant motion profile
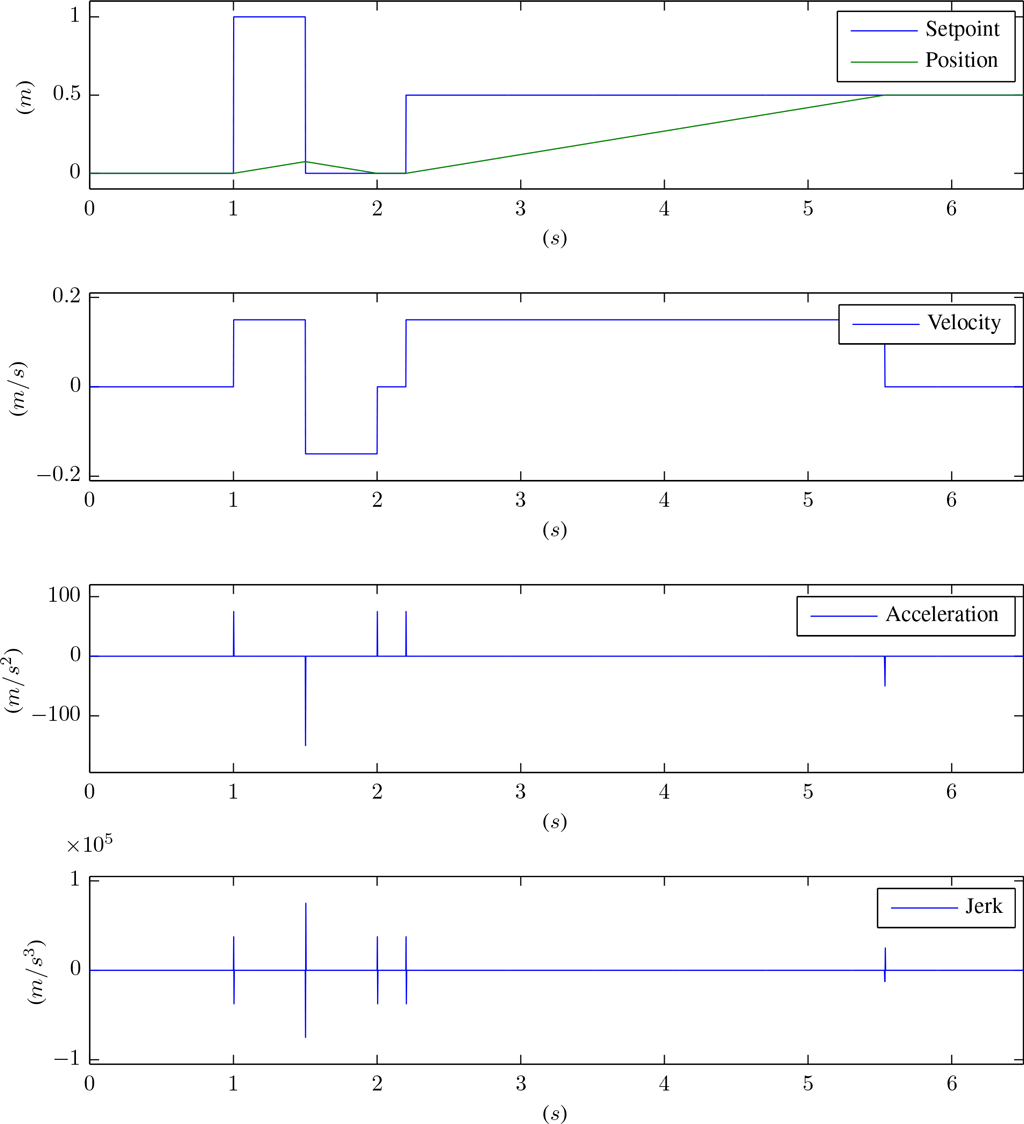 Limit velocity at 0.15 units/s.
Limit velocity at 0.15 units/s.
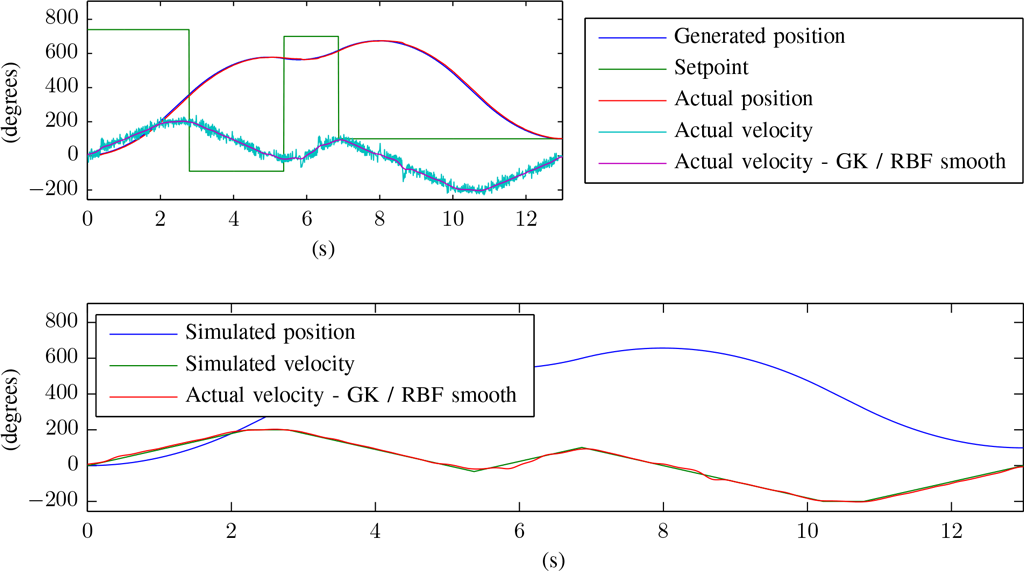
Usage of generator in an experiment
Author
This library has been developed by Wilbert van de Ridder as part of a BSc assignment at the University of Twente.