- Note that this repo is not always up to date. The rest of the project code lives in a private BitBucket repo -- please contact me (info at bottom) if you have any questions.
This code powers:
- Our 2016 WAFR paper (Workshop on the Algorithmic Foundations of Robotics)
-
Collision avoidance with quadrotor demonstrated up to 10 m/s:
-
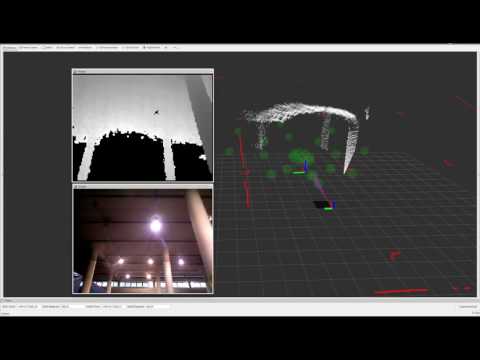
Onboard video:
-
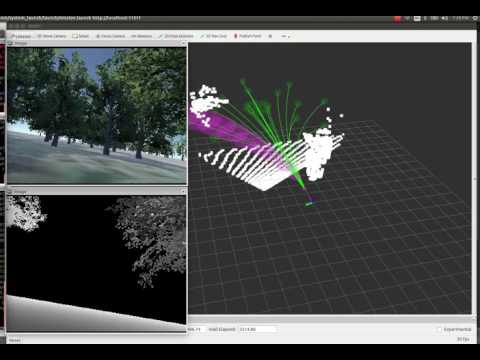
Simulated through forest at 10 m/s
-

Implements:
- A discrete motion primitive library
- Methods for choosing from motion primitives based on specified objectives
- Methods for evaluating collision probability against a depth image / point cloud
Maintainer: