More information:Notes of MultiviewX_Perception
MultiviewX_Perception可以接受命令行参数,从而用户可以快速高效地产生数据集。当未接收到相关参数时候,不会启用相关功能。
-a :Annotate and show the bbox on the first frame of each camera or not.
-s :Save the bbox on the first frame of each camera or not.
-k :Keep the remains of Perception dataset or not.
-f :Force calibrate and generate POM, regardless of perception.
-p n: Provide preview for the front n frames. ex. -p 5 will provide 5 frames to preview
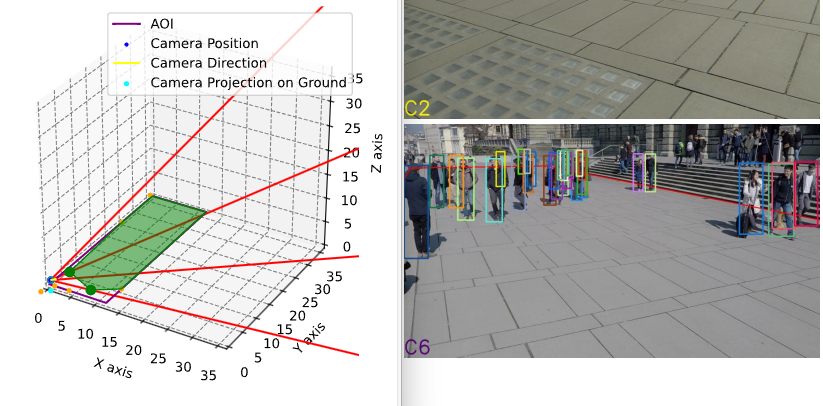
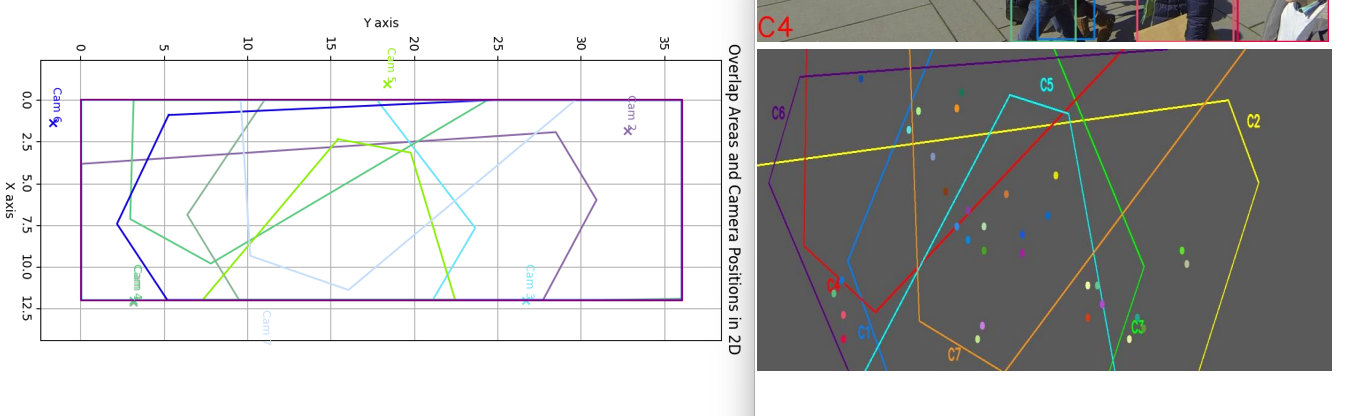
-v :Generate Overlap view for the dataset
-view path :Generate Overlap view for the specified dataset, there should be folder calibrations in the given path. ex. -view D:\Wildtrack