if you use this code for a paper, please cite the following:
@inproceedings{Hickson_2019_ICCV_Workshops,
author = {Hickson, Steven and Raveendran, Karthik and Fathi, Alireza and Murphy, Kevin and Essa, Irfan},
title = {Floors are Flat: Leveraging Semantics for Real-Time Surface Normal Prediction},
booktitle = {The IEEE International Conference on Computer Vision (ICCV) Workshops},
month = {Oct},
year = {2019}
}
This Contains the CreateNormals library. Using a depth and semantic label pair of images, we create a denoised and semantically corrected surface normals image.
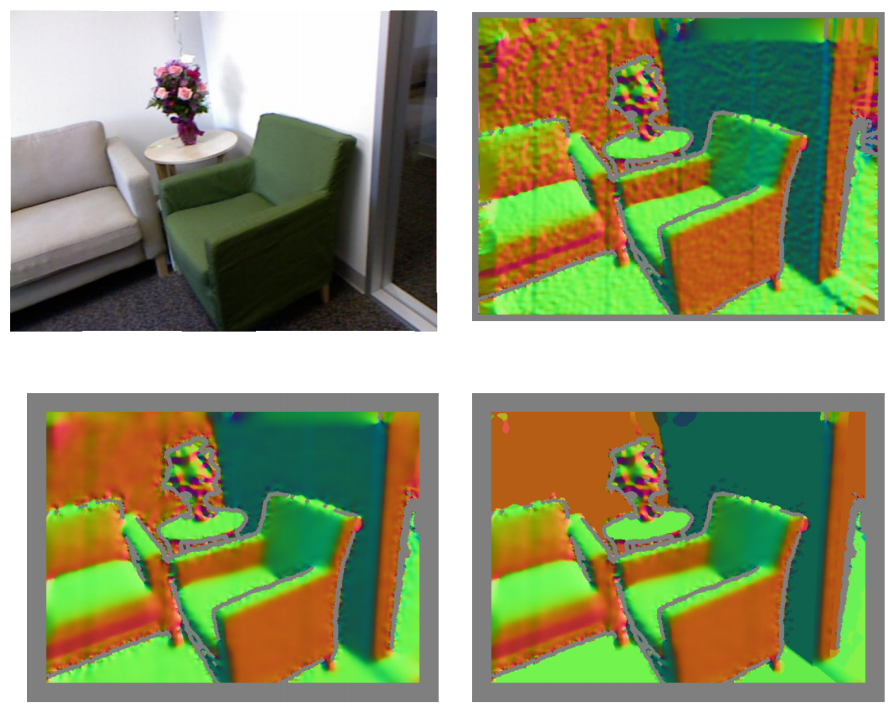
Above is the visualization of different ways of computing the "ground truth" normals. Top left: a sample image from the NYUDv2 dataset. Top-right: computed using currently used methods (similar to [4] in the paper). Bottom-left: results of our method using larger depth-adaptive smoothing. Bottomright: results of our method after semantic smoothing (if labels are available). Note that the back and right wall are cleaned up to a large degree due to this correction.
This library requires CMake, PCL, and Opencv. To compile run:
mkdir build
cd build
cmake -DCMAKE_BUILD_TYPE=Release ..
./CreateNormalsMain ../nyu_params.txt ../nyu_list.txt
The example params and list are included to see how the example script runs. Params is set up as two lines. The first line is the camera parameters flattened as a vector. Fx, scew, Cx, 0, Fy, Cy, 0, 0, scale. The second line are the surface normal computation parameters. These are the inpainting window (we use 5), the normal max depth change factor (we use 0.02), and the normal adaptive smoothing size (we use 30 for Kinect1/2 data and 10 for synthetic data). The last parameter is the planar threshold parameter, which controls whether planar surfaces are joined, i.e. what's the maximum distance we allow between two pixels before we decide they are two separate planar instances. The third line are the semantic labels that are considered flat (i.e. floors). Ex 4,11,21.
The list file is comma-delimited depth_file,labels_file,output_file.
An example of using the library in python is shown in the Test_Normals.ipynb file utilizing the python directory. It is a little slower than the normal method and only runs at 10FPS on my machine. Full details of the in depth ctypes code can be found in the python Readme The gist of it is:
import sys
sys.path.append('/home/steve/git/CreateNormals/')
from python.calc_normals import NormalCalculation
camera_params = [238.44,0,313.04,0,582.69,242.74,0,0,1]
normal_params = [5,0.02,30,0.04]
flat_labels = [4,11,15,19,21,28,34,36,37,45,64]
norm_calc = NormalCalculation(camera_params, normal_params, flat_labels)
new_normals = norm_calc.Calculate(depth, labels)