
Connect with Us • Installation • Setup • Demos

sudo apt-get install ros-melodic-joy ros-melodic-teleop-twist-joy ros-melodic-teleop-twist-keyboard ros-melodic-amcl ros-melodic-map-server ros-melodic-move-base ros-melodic-urdf ros-melodic-xacro ros-melodic-rqt-image-view ros-melodic-gmapping ros-melodic-navigation ros-melodic-joint-state-publisher ros-melodic-robot-state-publisher ros-melodic-slam-gmapping ros-melodic-dwa-local-planner ros-melodic-joint-state-publisher-gui ros-melodic-cartographer-ros ros-melodic-cartographer-rviz
cd ~/your workscpace
catkin_make
Make sure you clone the repo in your robot and your remote PC
git clone --recursive https://github.com/rigbetellabs/tortoisebot.git
cd ~/your workscpace
catkin_make
- Run bringup.launch
- Run server_bringup.launch
- slam.launch
- navigation.launch
- Run bringup.launch
- Run server_bringup.launch for SLAM
- slam.launch for Nav
- navigation.launch
| Simulation | Vizualisation of Sensors (Lidar,Odometery,Camera) |
|---|---|
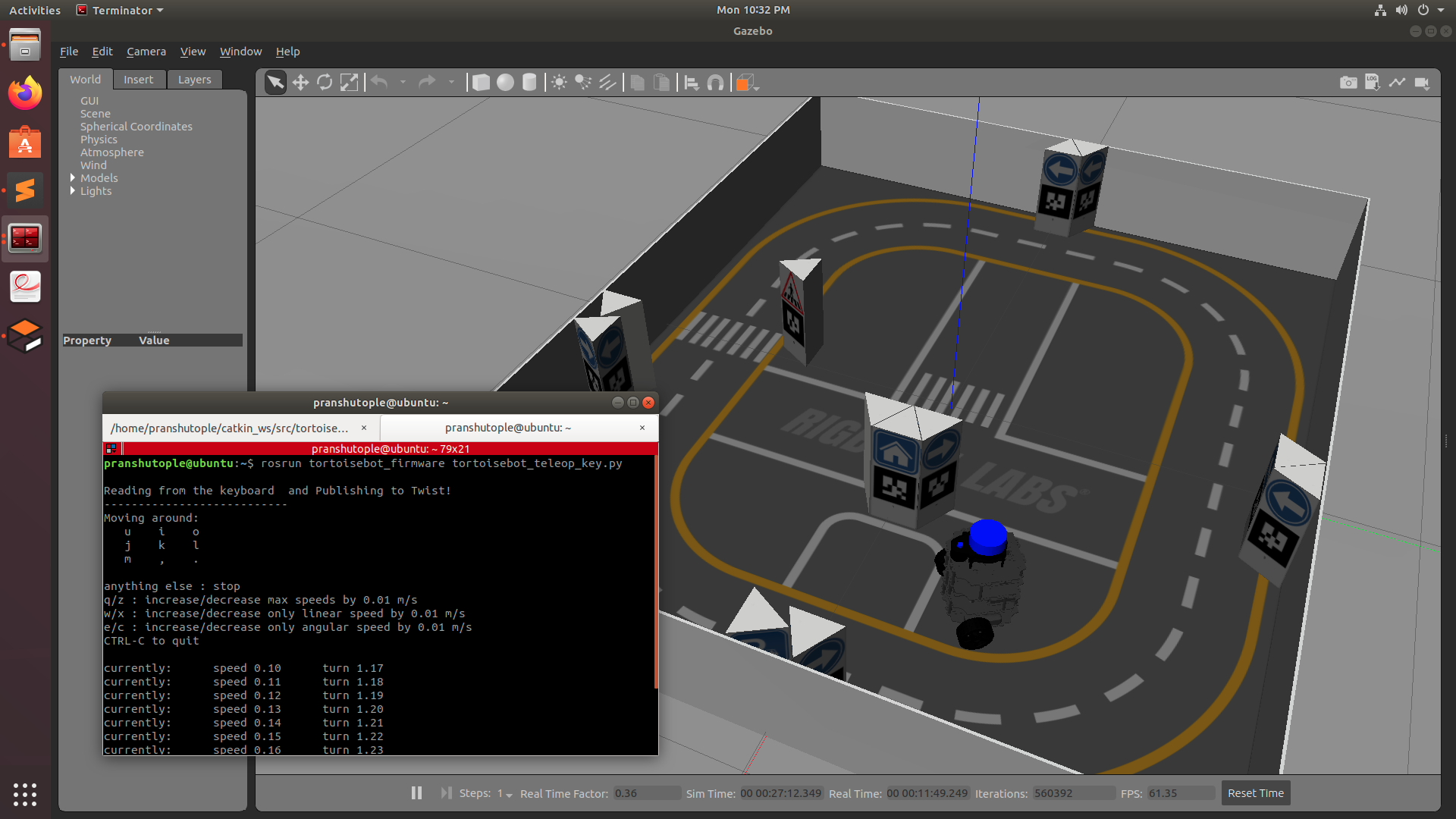 |
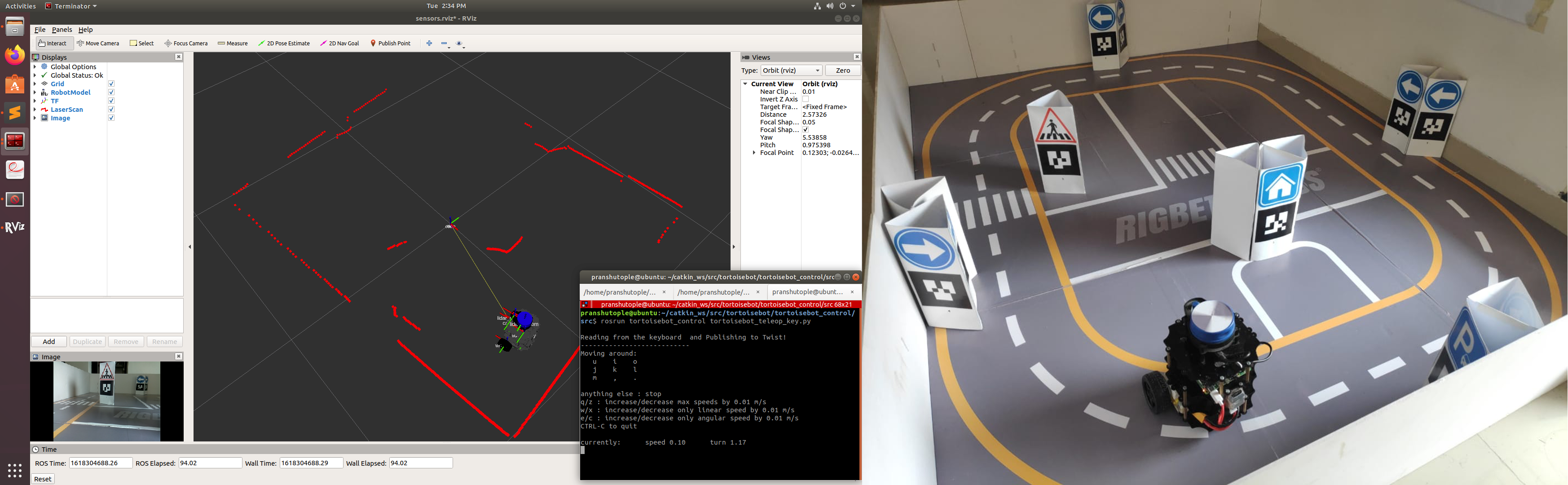 |
| Teleop | Mapping | Navigation |
|---|---|---|
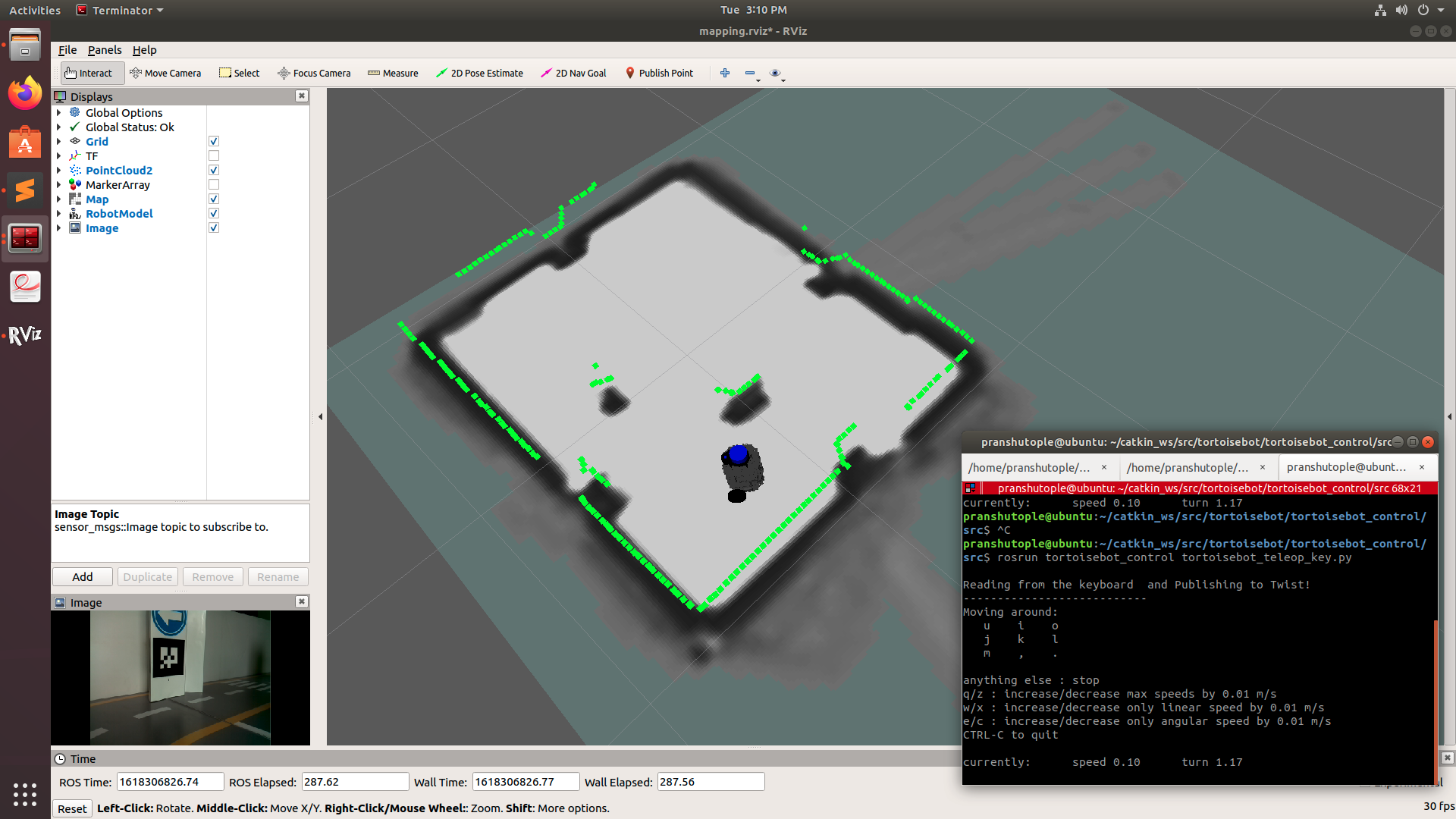 |
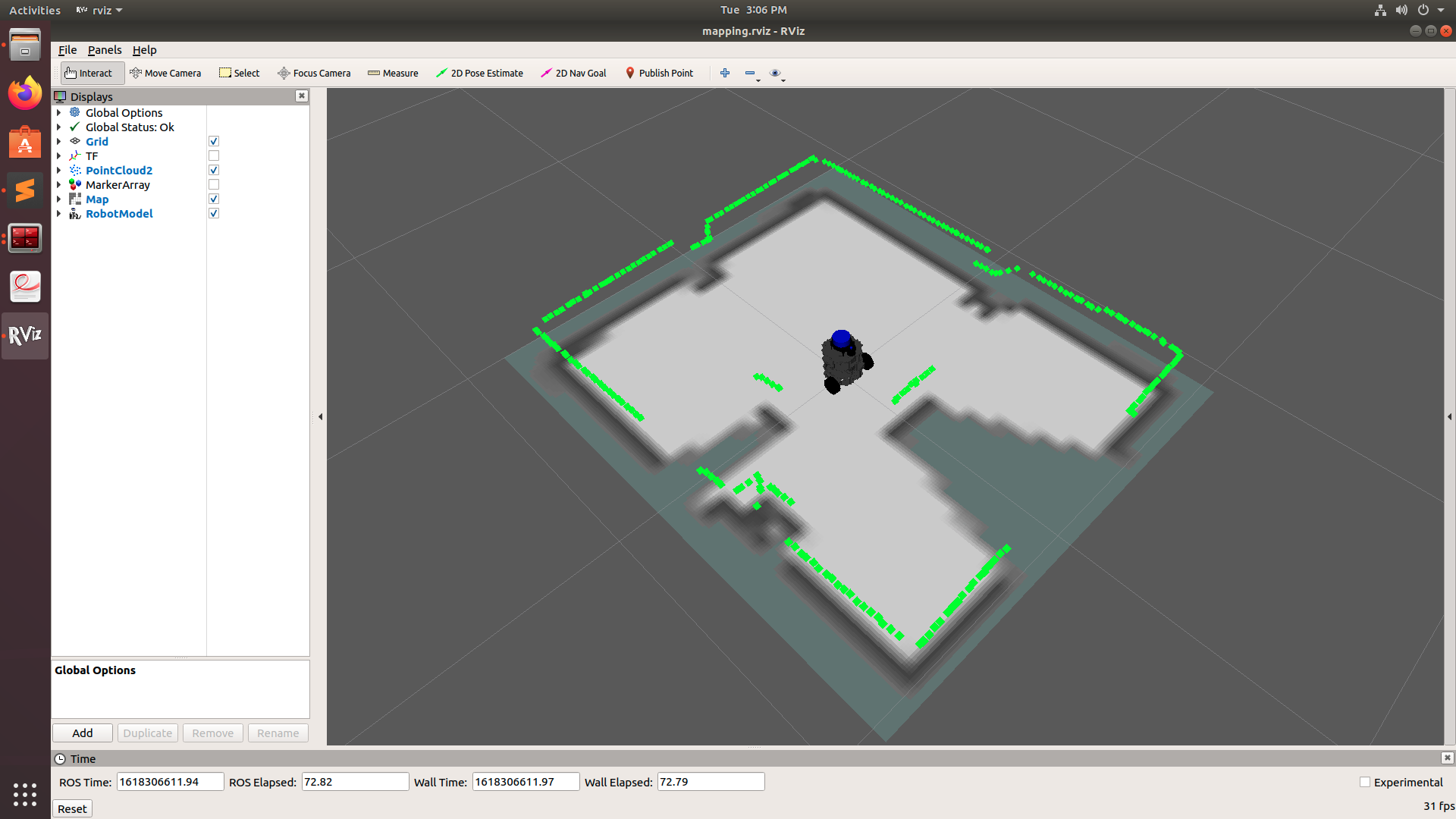 |
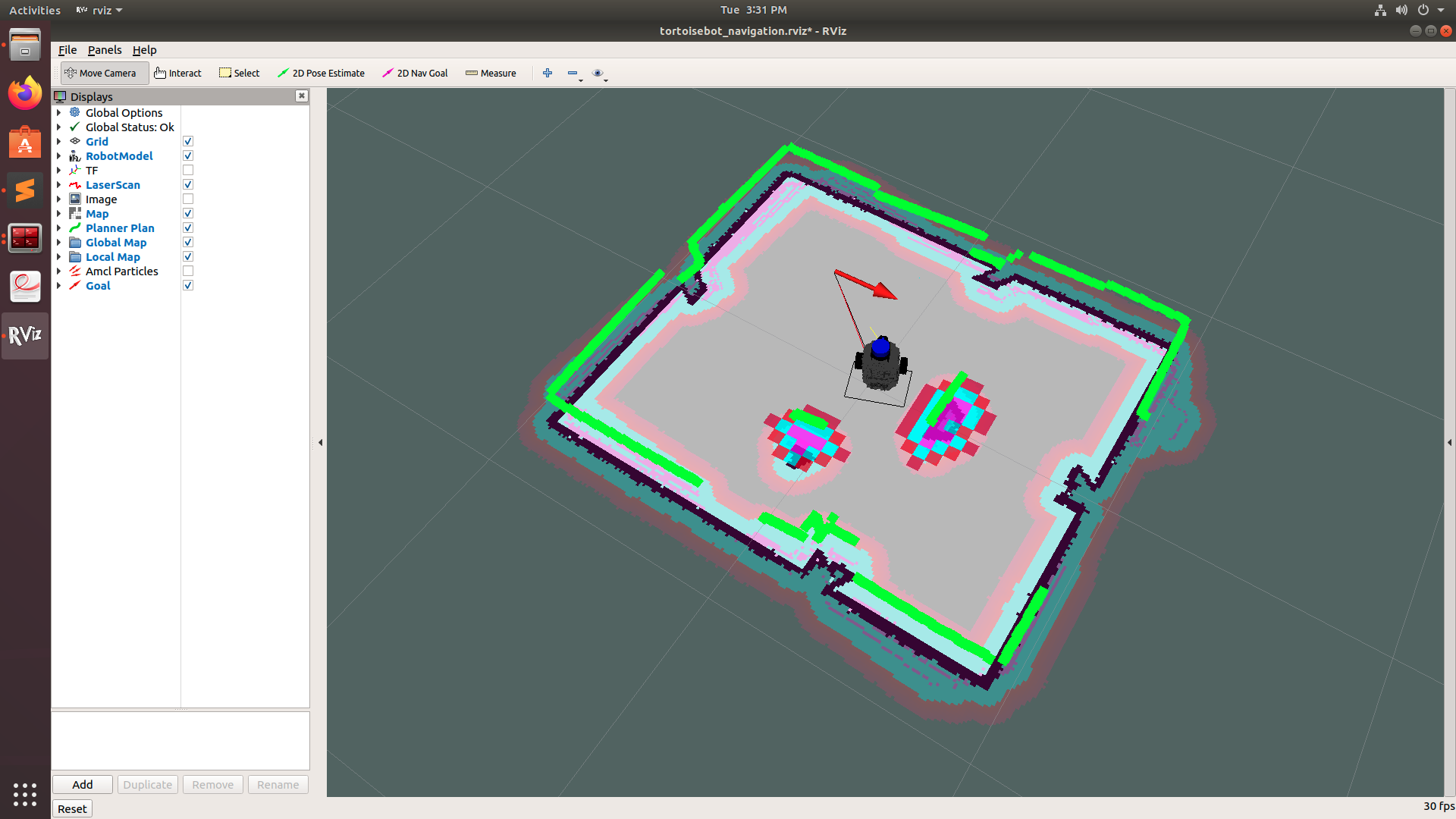 |
The ReadMe is divided into several sections as per different topics and is constantly been updated and maintained with new updates by our talented and dedicated 👥 Team at RigBetel Labs LLP. So don't forget to often come here and check on it for the latest and greatest software updates, projects & skills for your TortoiseBot. Also don't forget to 🌟 Star this repository on top-right corner of the screen to show your 💖 Love and Support 🤗 for our Team. 🤩 It will make us happy and encourage us to make and bring more such projects for you. 😍 Click here to get started.
Join our community for Free. Post your projects or ask questions if you need any help.
RigBetel Labs LLP®, Charholi Bk., via. Loheagaon, Pune - 412105, MH, India 🇮🇳
🌐 RigBetelLabs.com 📞 +91-8432152998 📨 getintouch.rbl@gmail.com , info@rigbetellabs.com
LinkedIn | Instagram | Facebook | Twitter | YouTube | Discord Community