exoedu-robot
simulation
- Build urdf model using stl files and load in the pybullet simulation.
export MESA_GL_VERSION_OVERRIDE=3.3 python test_robot.py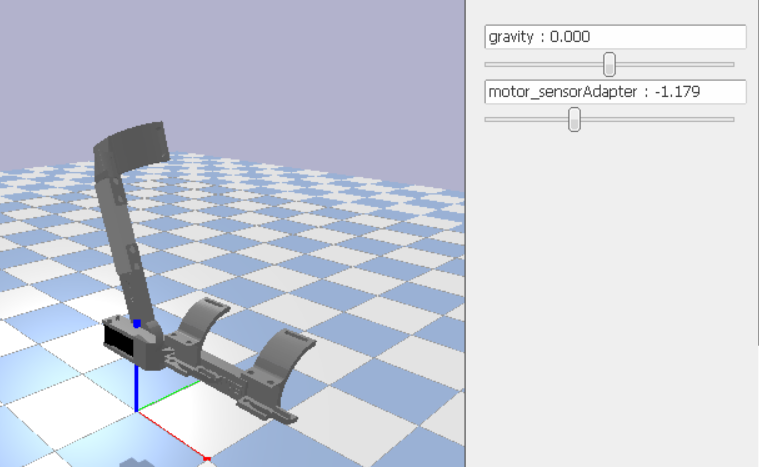

connect through ROS
-
launch aduino - tutorial. Use arduino IDE to upload the code to the arduino/ Once the compilation is completed, you will receive a message about program storage space and dynamic memory usage, similar to this:
Sketch uses 9,392 bytes (29%) of program storage space. Maximum is 32,256 bytes. Global variables use 1,356 bytes (66%) of dynamic memory, leaving 692 bytes for local variables. Maximum is 2,048 byte -
launch rosserial node to publish sensor data
chmod a+rw /dev/ttyACM0 export ROS_MASTER_URI=http://192.168.100.68:11311 export ROS_HOSTNAME=192.168.100.203 rosrun rosserial_arduino serial_node.py /dev/ttyACM0 _baud:=57600 export MESA_GL_VERSION_OVERRIDE=3.3 python main.py

connect through Webots
- launch webots with web interface. Run the bash to install webots thourgh binary release or deb - tutorial.
In the webot_worlds/web folder, run following command to launch the web server
export WEBOTS_HOME=/home/username/webots export MESA_GL_VERSION_OVERRIDE=3.3 webots /root/exoedu-robot/webot_worlds/worlds/exoedu_blank.wbt --no-sandbox --streamRemember to open the simulation server port 1234 and then access the client GUI by the address: localhost_ip:8000python3 -m http.server