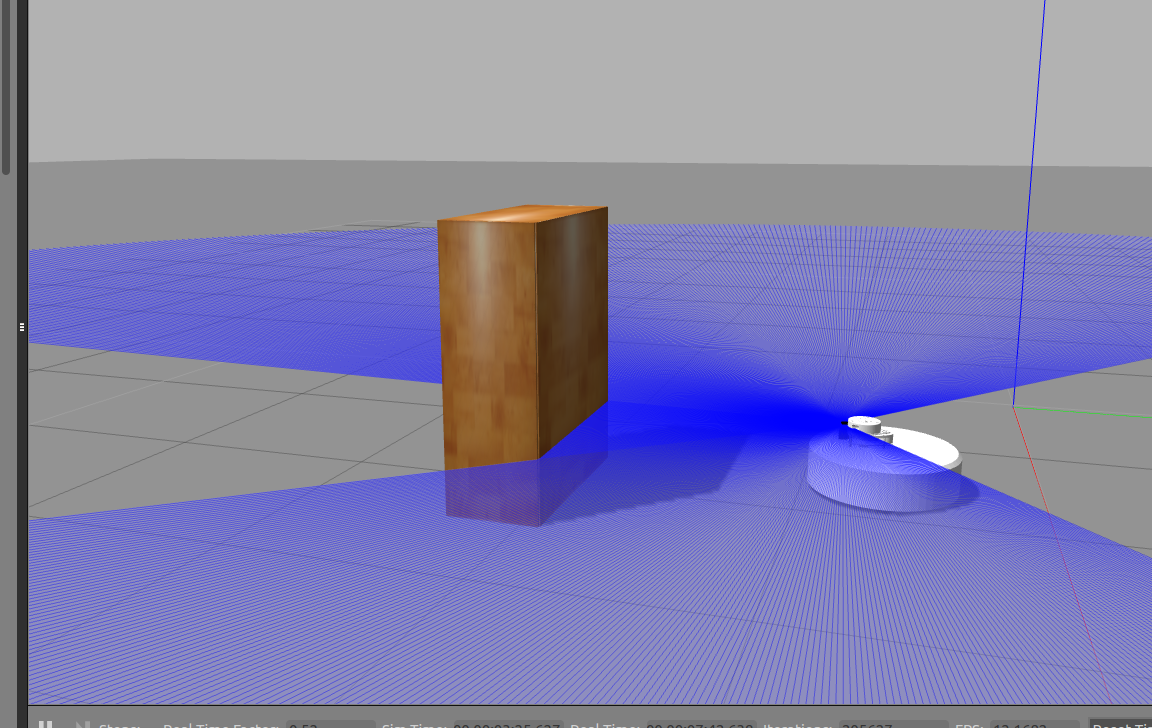
The Vacuum-Bot is a vacuum cleaner robot, where we installed many ROS packages to make it Autonomous robot based on Gazebo simulations and real-time deployment
- Ubuntu 16.04
- ROS Kinetic
- Gazebo-7
- ROS-Nav Stack
- tf packages
- Clone the repo under $HOME
- cd inside the repo directory then cd into catkin_ws/
- run " catkin clean "
- run " catkin build "
- run " source devel/setup.bash "
- Locate the gazebo model under proper directory to be seen by the gazebo gui: To create a directory under $HOME named " model_editor_models " then place the contents of Gazebo Model folder into this folder.
run " roslaunch vaccum_robot vaccum_robot.launch "
run " roslaunch vaccum_bot_navigation gmapping_demo.launch "
run " rosrun rviz rviz " then load this file " src/vaccum_robot/vaccumbot_viz.rviz "
run " rostopic pub /move_base_simple/goal geometry_msgs/PoseStamped '{header: {stamp: now, frame_id: "/map"}, pose: {position: {x: 0.0, y: 0.0, z: 0.0}, orientation: {w: 1.0}}} "