Pytorch YOLOV3 to TensorRT for inferencing on Jetson Nano
- numpy
- onnx==1.4.1
- pycuda==2019.1
- wget>=3.2
- Pillow>=5.2.0
- bistiming
- scipy==1.2.1
1. Jetson Nano Installation:
Follow NVIDIA instruction from NVIDIA Site
2. Edit Swap file:
fallocate -l 4G /swapfile
chmod 600 /swapfile
mkswap /swapfile
swapon /swapfile
swapon -show
sudo ./set_swap.sh
3. Clone yolov3-tensorrt sample from this repo, download yolov3.weights file from YOLO site:
git clone https://github.com/penolove/yolov3-tensorrt
cd yolov3-tensorrt
mkdir weights
cd weights
wget https://pjreddie.com/media/files/yolov3.weights
cd ..
4. Convert yolov3 to ONNX:
Change .cfg and .weights path (downloaded in [3.]) in yolov3_to_onnx.py and run:
python3 yolov3_to_onnx.py
5. Convert ONNX to tensorRT:
python3 onnx_to_tensorrt.py
6. FP16 MODE: To run model on FP16 mode (on Tensor Core), ONNX weights need to be converted to FP16 mode in [5.]. To do this, onnx_to_tensorrt.py needs to be modified as follow:
with trt.Builder(TRT_LOGGER) as builder, builder.create_network() as network, trt.OnnxParser(network, TRT_LOGGER) as parser:
builder.max_workspace_size = 1 << 30 # 1GB
builder.max_batch_size = 1
builder.fp16_mode = True
- Completing "1." to "5." will give you a 1FPS engine running on Jetson Nano.
- After "6." will give you a 2FPS yolov3-608 engine running on Jetson Nano.
- Be able to run pytorch yolov3 model on Jetson Nano.
- Convert model to TensortRT Engine for system optimization.
- Be able to run FP16 mode for 2x faster speed.
- Use ONNX-simplifier for light ONNX graph before converting it into tensorRT version.
- Try out lower input resolution for speed test (288x288) to compare with SSD300 MobileNet.
- Do speed and accuracy test on yolov3-288 version.
- Train yolov3 on 1-class for product-specific model, thus increase speed.
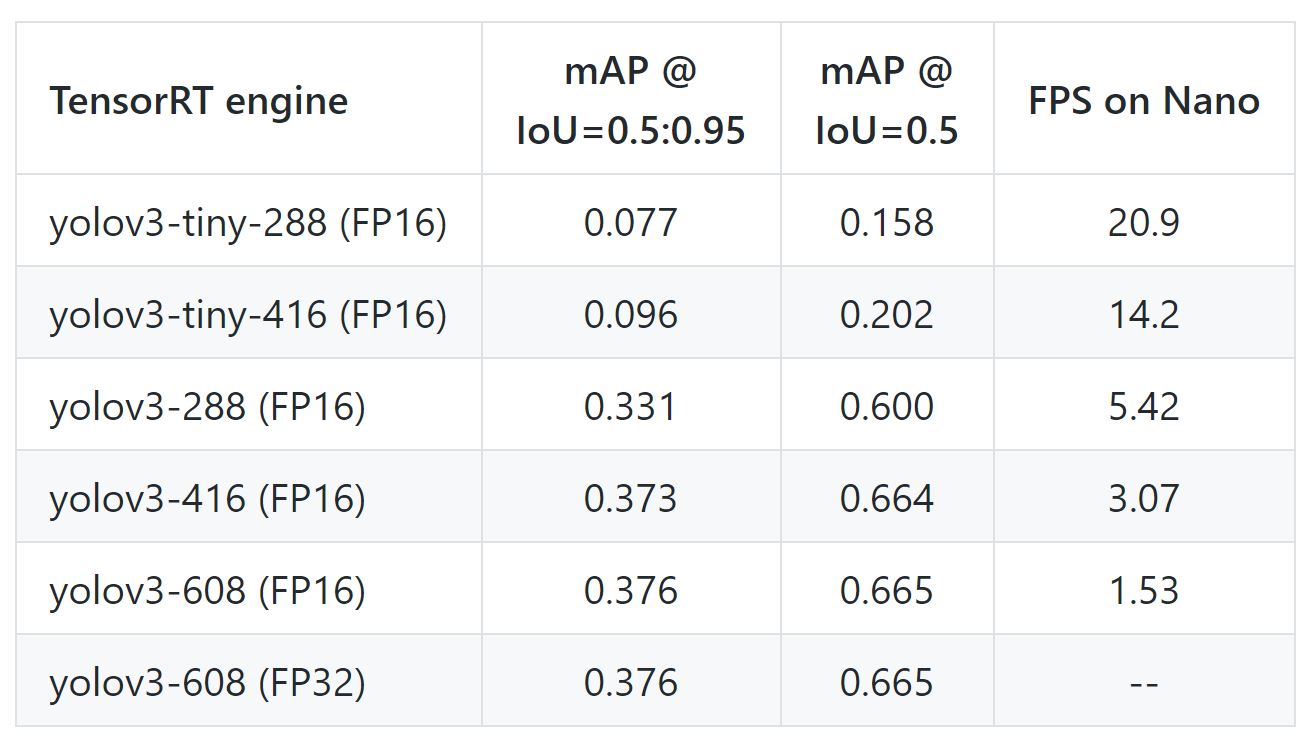
- https://jkjung-avt.github.io/tensorrt-yolov3/
As showed in jkjung-avt/tensorrt_demos git repo, he test yolov3 on Jetson Nano and get 20FPS for yolov3-tiny-288 (FP16) and 5FPS for yolov3-288 (FP16).