This is the repository for the code implementation, results, and dataset of the paper titled "Robust Multi-Modal Multi-LiDAR-Inertial Odometry and Mapping for Indoor Environments". The current version of the paper can be accessed at here.



- 2023.09.30 : Add docker support
- 2023.04.30 : Upload multi-modal lidar-inertial odom
- 2023.03.02 : Init repo
- cd ~/catkin_ws/src
- git clone https://github.com/TIERS/multi-modal-loam.git
- cd multi-modal-loam
- docker build --progress=plain . -t mm-loam
- git submodule update --init --recursive
Note: We recommend using a Docker container to run this code because there are unresolved dependencies in some Ubuntu system. Docker containers provide a consistent and isolated environment, ensuring that the code runs smoothly across different systems.
roscore
rosbag play office_2022-04-21-19-14-23.bag --clock
docker run --rm -it --network=host mm-loam /bin/bash -c "roslaunch mm_loam mm_lio_full.launch"
rviz -d mm-loam/config/backlio_viz.rviz
TODO
Indoor environments:
Outdoor enviornments:
- Street (27.7 GB) Uploading
- Forest (44 GB) Uploading
More datasets can be found in our previous work:
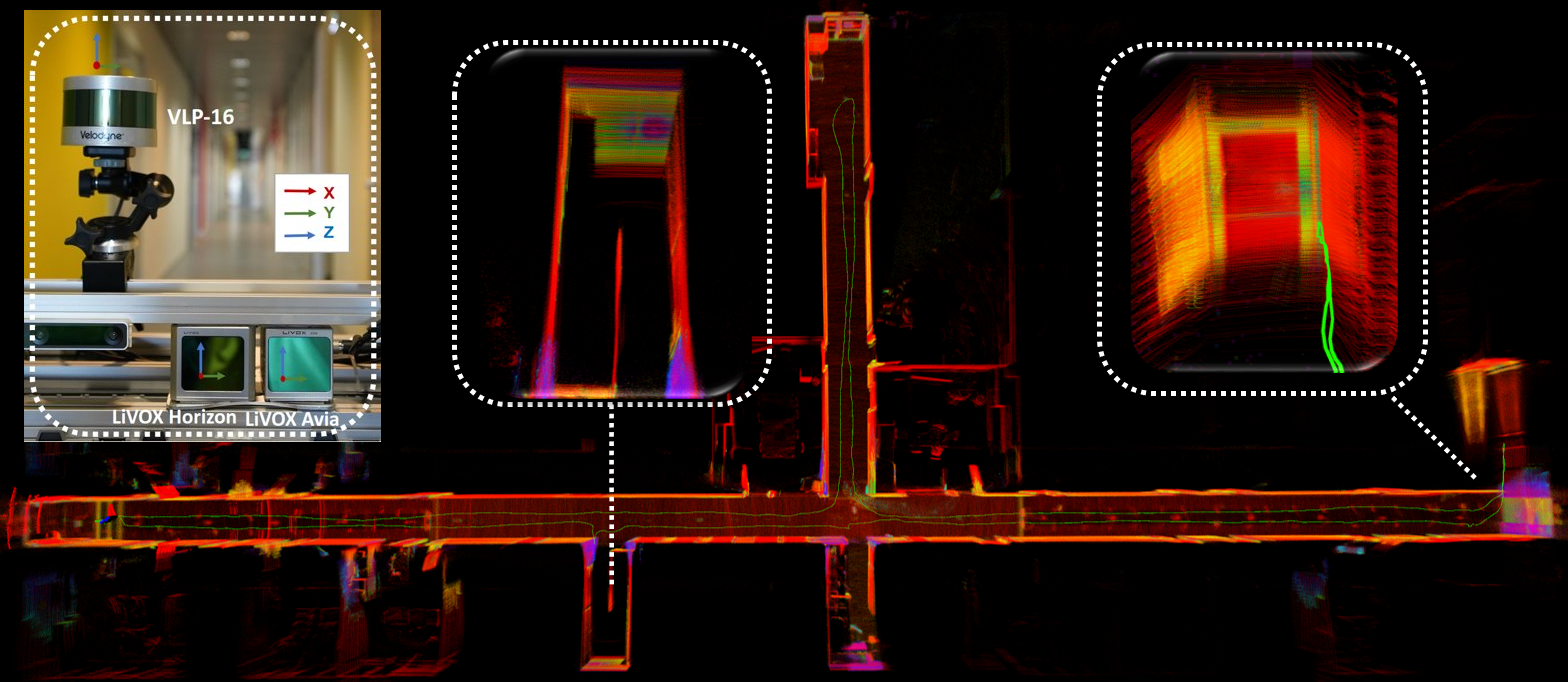
- Hardware and Mapping result in long corridor environment. Our proposed methods show robust performance in long corridor environments and survive in narrow spaces where 180°U-turn occur.
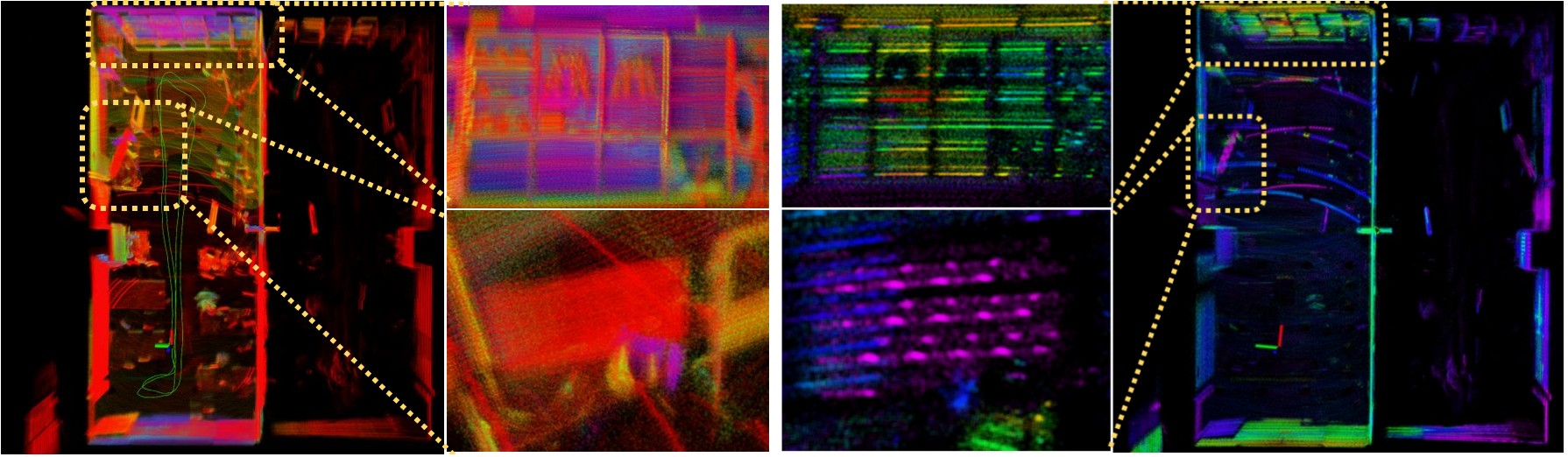
- Qualitative comparison of map details in the office room dataset sequence. The color of the points represents the reflectivity provided by raw sensor data. The point size is 0.01, and transparency is set to 0.05. The middle two columns show the zoom-in view of the wall (top) and TV (bottom).
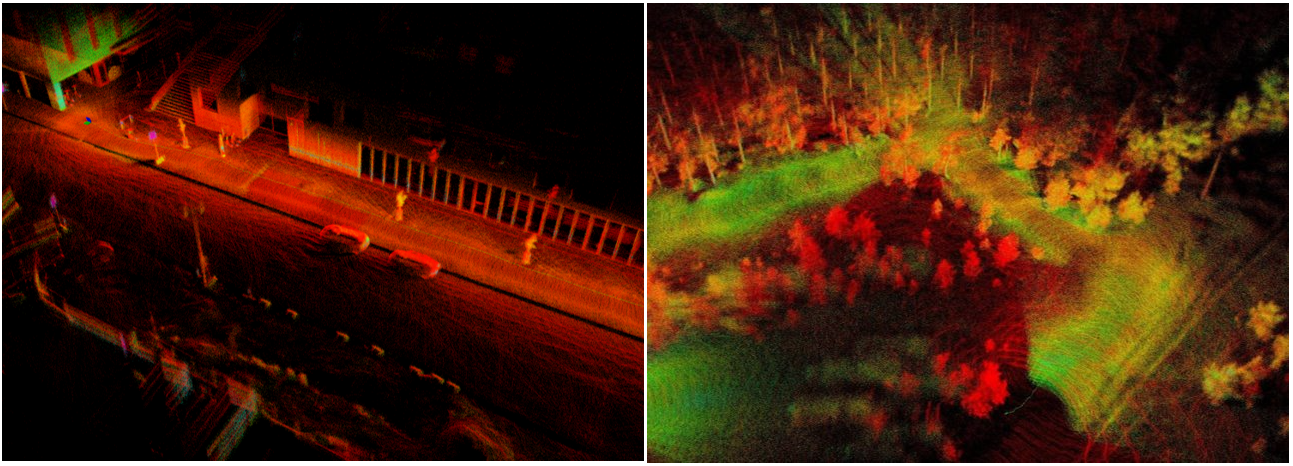
- Mapping results with the proposed method outdoors: urban street (left) and forest environment (right)..



This repo has borrowed code from the following great repositories and has included relevant copyrights in the code to give proper credit. We are grateful for the excellent work done by the creators of the original repositories, which has made this work possible. We encourage the user to read material from those original repositories.
- LIO-LIVOX : A Robust LiDAR-Inertial Odometry for Livox LiDAR
- LEGO-LOAM : A lightweight and ground optimized lidar odometry and mapping
- LIO-MAPPING : A Tightly Coupled 3D Lidar and Inertial Odometry and Mapping Approach