M8 lidar
yashspatel09 opened this issue · comments

Hey I was able to get the display by changing topic name.
Now how do I get person tracking working. Seems when I try to check rostopic for filtered and clustered topics they are not publishing anything.
Guide me where am I going wrong.
I am initializing m8 lidar using Quanergy_client_ros. Is that a problem? or do I have any other option.
@MyNameIsCosmo

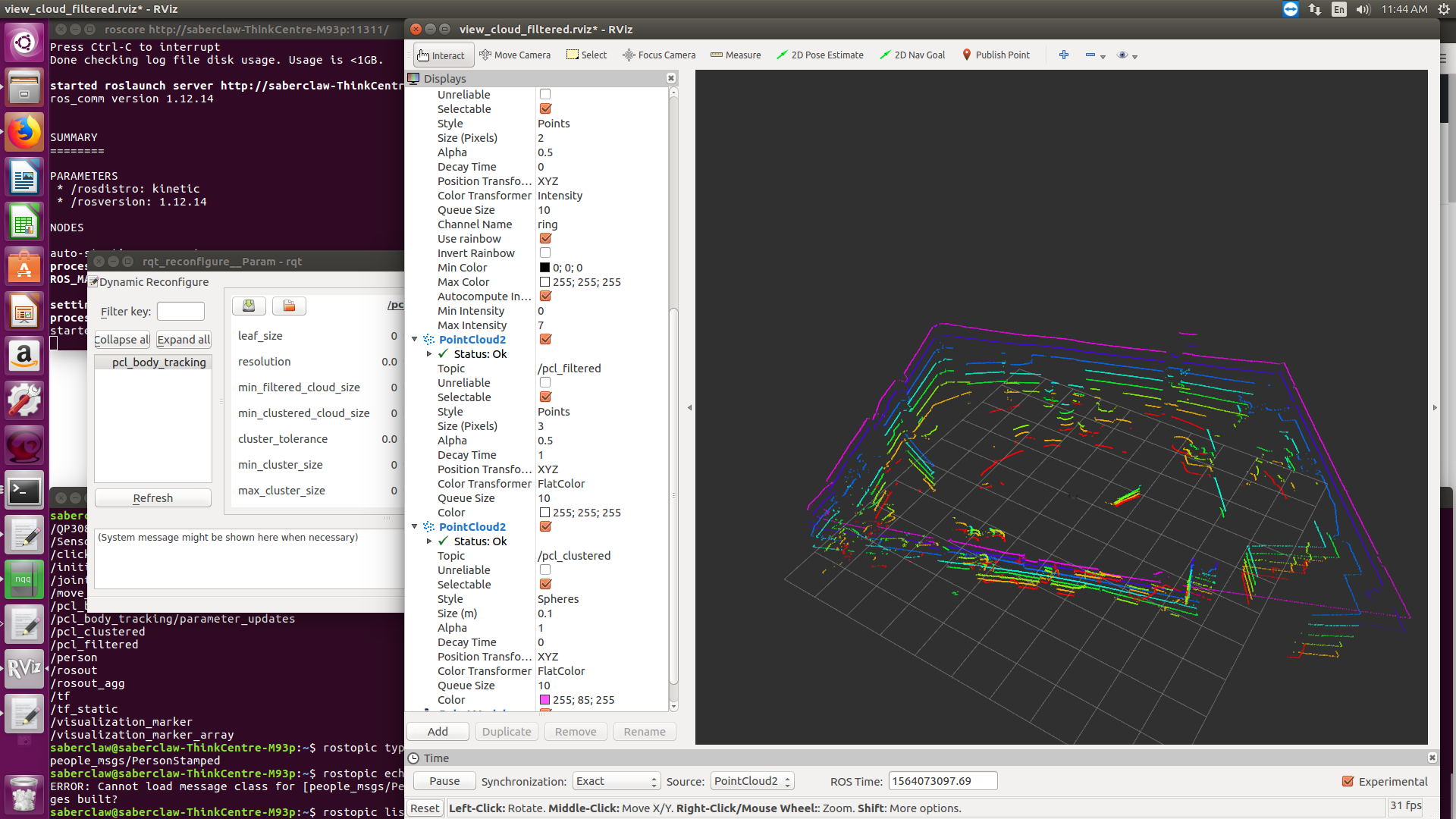
Try adjusting the values in the Dynamic Reconfigure starting with the filtered cloud and cluster sizes.
Also check the output of the lidar_body_tracking node in your terminal. You may need to pass --screen to the end of your roslaunch command.
Hey I know I am not helping you much with this info but I am new with ROS and trying to figure out what I am doing wrong. Please guide me through this. This image shows 2 files that needs frame id change and 2 terminals with roslaunch and rostopic. For some reasone QP308 is still displaying and there is still no data in filtered or clustered nodes.

Can you please walk me through this. I would be really thankful
In the lidar_body_tracking.launch (top-left) try changing scan_topic to /QP308/pc_QP308
/QP308/pc_QP308 is the Point Cloud topic published by the Quanergy Lidar driver.
Welcome to ROS!
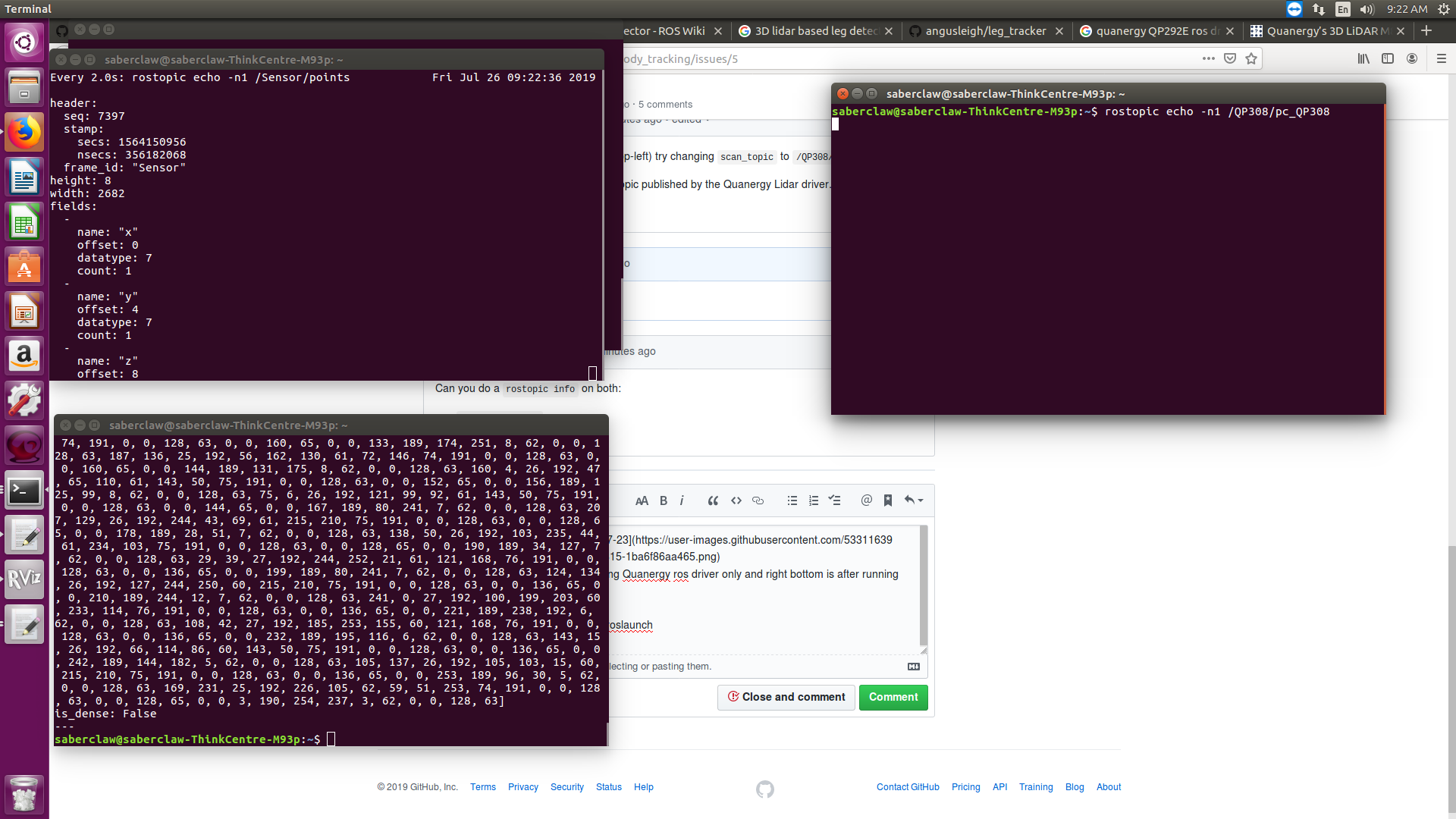
Yup in my case it is Sensor/points
Can you do a rostopic info on both:
/QP308/pc_QP308/Sensor/points

left bottom is rostopic list after running Quanergy ros driver only and right bottom is after running lidar_body_tracking roslaunch
So I believe QP308 is coming from roslaunch. Please check following screenshots. Left side is /Sensor/topics and right side is /QP308
Again I am sorry for troubling you so much
The frame_id in the topic is set to Sensor.
The URDF robot_name should be set to the same frame_id as the topic:
https://github.com/MyNameIsCosmo/lidar_body_tracking/blob/master/urdf/m8.urdf.xacro#L2
Try changing name="sensor_m8" to name="Sensor"
do I change macro name as well? ( <xacro:macro name="sensor_m8">)
Nah, the macro name is irrelevant to this issue.
In fact, the macro is redundant for the Xacro file and is confusing, but that's an issue for a later date.

Well something silly mistake is been getting on for sure/
I derped
The actual value you need to change in the urdf is the link:
https://github.com/MyNameIsCosmo/lidar_body_tracking/blob/master/urdf/m8.urdf.xacro#L8-L10
<child link="Sensor"/>
</joint>
<link name="Sensor">
<?xml version="3.0"?> <robot name="Sensor" xmlns:xacro="http://ros.org/wiki/xacro"> <xacro:macro name="sensor_m8"> <link name="base_link"/> <joint name="m8_joint" type="fixed"> <origin xyz="0 0 0" rpy="0 0 0"/> <parent link="base_link"/> <child link="Sensor"/> </joint> <link name="Sensor"> <visual> <origin xyz="0 0 0" rpy="0 0 0"/> <geometry> <cylinder length="0.0876" radius="0.10315"/> </geometry> <material name="dark_grey"> <color rgba="0.3 0.3 0.3 1"/> </material> </visual> </link> </xacro:macro> <sensor_m8/> </robot>
I did changed it to Sensor much before
Can it be possible that it height might be the reason? I can try placing it higher if needed
Height shouldn't be a reason since height should remain independent of the data.
Try putting some debug info like ROS_INFO('cloud_cb') into the cloud_cb function, and work your way from there.
Few things to check are:
- frame_id of your sensor topics (use
rostopic echo -n1 /Sensor/points/header/frame_id) - link in the urdf is the same as the frame_id
- there is a pointcloud from the sensor and the dynamic reconfigure settings seem reasonable (you may have to play with cluster sizing, but the defaults worked for the m8 I had)
- There are no clashing roslaunch files (
rospack find lidar_body_trackingshould bring up the current catkin workspace you're working with)
Okay. Just one more thing before I do debugging. What should be the output for pcl_clustered and pcl_filtered when you do rostopic echo pcl_clustered/filtered
They should look like the same pointcloud message from Sensor/points except with less data
Alrighty. Let me give it a try and see if anything works for me. I will ping you with result once I am done.
Thanks once again