亲爱的鱼粉(请允许小鱼这么称呼),你好!我是《鱼香ROS》作者小鱼,很高兴你能看到这本在线教程,那么从现在开始希望你可以和小鱼一起动手学习ROS2、学习机器人。
小鱼很荣幸的告诉你,现在你所看到的教程已经是《动手学ROS2》的第二版了,第二版相较于第一版主要有以下改进:
- 采用ROS2五年长期支持版Humble版本进行讲解(第一版为Foxy版本,2023年停止维护)
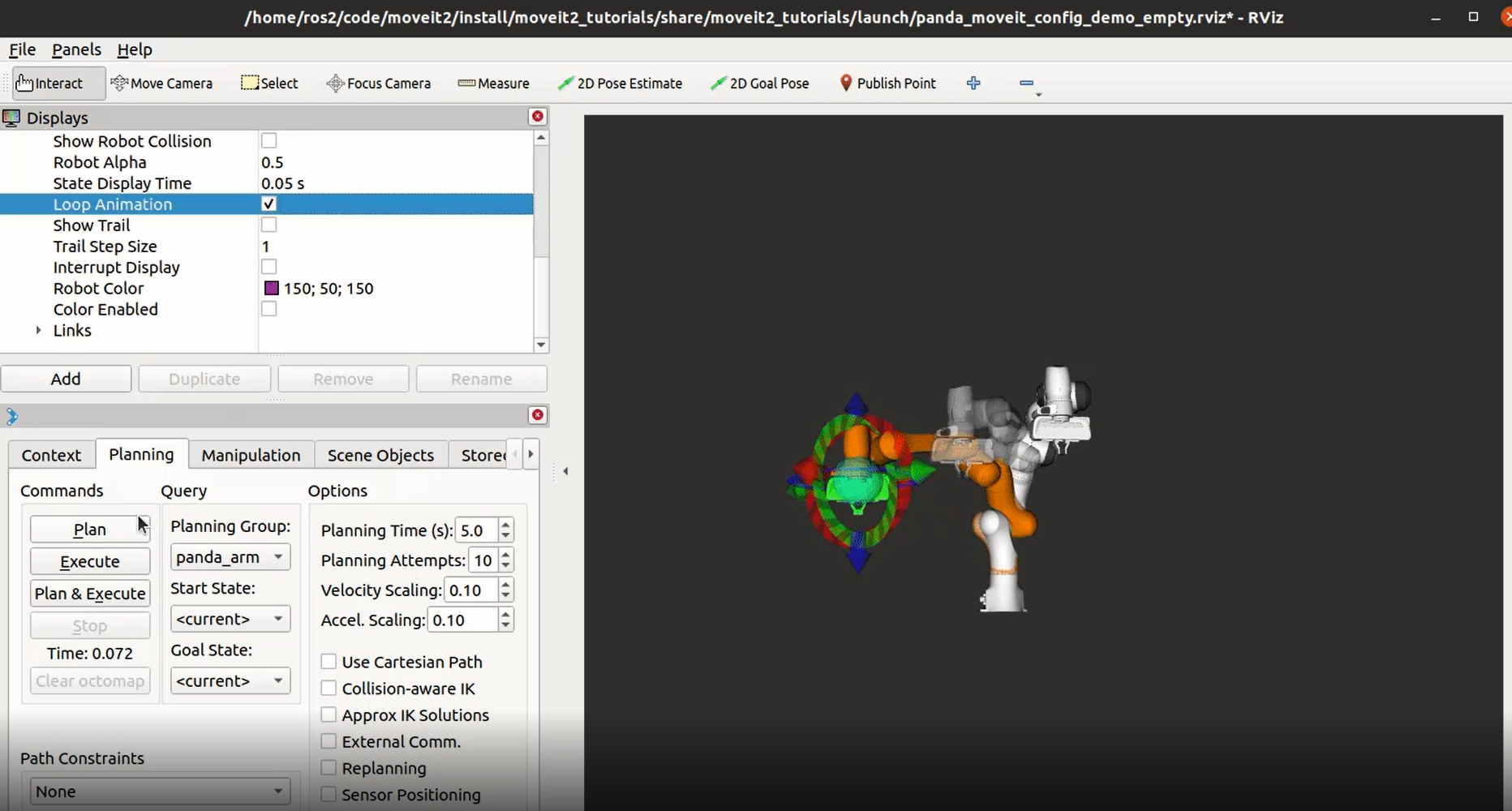
- 增加Moveit2机械臂运动规划内容
- 增加Nav2进阶内容内容
- 增加DDS和ROS2通信机制进阶内容
- 优化文章结构和知识体系
- 增加ROS2-Control部分内容
- 增加MicroROS嵌入式内容
- 增加ROS2开源小车制作内容
- 完善机器人运动学相关内容
后疫情时代,国内机器人行业也随之兴起,ROS机器人操作系统(Robot Operating System)作为快速搭建机器人的一大利器,在机器人行业的开发中被广泛使用。
ROS2作为第二代机器人操作系统,继承了ROS强大的生态,采用了全新的架构设计,使得ROS2满足现代机器人系统的实时性、安全性、标准性、可靠性等要求。
在未来,机器人将走进我们的生活之中,掌握机器人技术将成为每一个技术人员的必修课,而本教程旨在以ROS2为工具,从基础开始讲起,带你入门机器人,玩转机器人。
本教程采用在线教程文档形式,随着ROS2的更新而不断更新,大家可以关注小鱼个人公众号《鱼香ROS》,加入技术交流群第一时间获取更新通知
ROS2强大之处在于其生态系统,基于ROS2的软件库和工具集,针对不同种类的机器人和应用场景,衍生出了一系列机器人框架,比如:
-
Nav2移动机器人导航 https://www.bilibili.com/video/BV1Ef4y1P7wt/
-
Moveit2的机械臂运动规划 https://mp.weixin.qq.com/s/Lx-xLO_C9NKxCcRBHj2gUw
-
ROS2的多机器人协同研究 https://osrf.github.io/ros2multirobotbook/intro.html




为了让不同阶段的读者从本教程受益,小鱼会从基础、入门、进阶三部分进行讲解,本教程主要适合人群有:
- 机器人相关的大学生和的研究生等
- 有一定编程基础想要转行从事机器人的小伙伴
- 已有ROS基础想要学习ROS2的在职工程师
- 机器人爱好者或其他想学习了解机器人的小伙伴
没有任何问题,即使你不是机器人相关专业也没事,小鱼会在教程中给大家讲解。
本教程使用Python和C++编程语言实现,大家只需要掌握其中之一即可。
所以对于没有任何编程基础的小伙伴,可以简单的学习一下Python语言,两三天就可以无证上岗了。
教程分为基础篇、机器人学篇、建模仿真篇、Nav2导航篇、ROS2控制篇、实体机器人篇、Moveit2机械臂篇。
基础篇主要对ROS2的软件库和工具集进行介绍,通过基础篇的学习,你可以掌握ROS2常用工具使用,并可以通过C++或Python调用ROS2的API进行通信。
- 第 1 章 ROS2介绍与安装
- 第 2 章 ROS2概念通识
- 第 3 章 ROS2通信机制入门(话题与服务)
- 第 4 章 ROS2通信机制进阶(参数与Action)
- 第 5 章 ROS2常用工具
通过对基础的机器人学进行学习,丰富你的机器人理论知识,使得接下来的学习畅通无阻。
- 第 6 章 运动学基础
- 第 7 章 ROS2运动学
通过对机器人的结构进行建模,实现在ROS2的GUI工具中展示机器人模型,并进行仿真,让你的机器人动起来。
- 第 8 章 机器人建模
- 第 9 章 机器人仿真
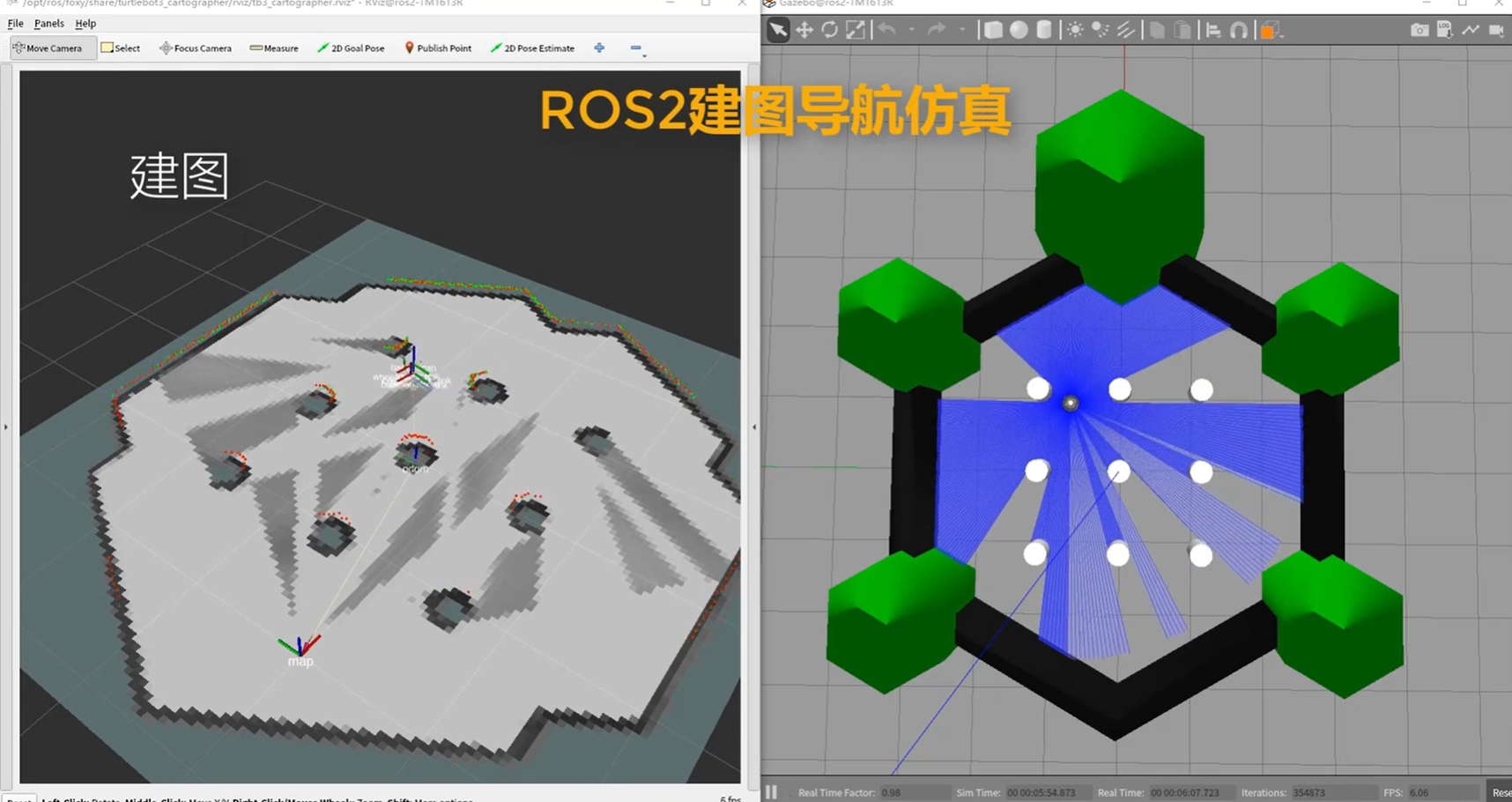
通过对Nav2框架结合仿真机器人进行实战,带你了解机器人建图导航技术,同时增加了进阶篇内容,小鱼带你一起将自己的算法在Nav2上进行实现。
- 第 10 章 SLAM建图
- 第 11 章 Nav2导航仿真实战
- 第 12 章 Nav2进阶实践
先介绍ROS2-Control,接着小鱼带你在硬件上实现ROS2控制。
- 第 13 章 ROS2-Control
- 第 14 章 MicroROS
- 第 15 章 ROS2控制硬件实战
手把手小鱼带你做一个可以建图导航到处跑的真的机器人出来。
- 第 16 章 实体机器人硬件搭建
- 第 17 章 嵌入式控制及通信开发
- 第 18 章 上位机建图及导航
手把手小鱼带你做一个可以建图导航到处跑的机器人出来。
- 第 19 章 Moveit2仿真
- 第 20 章 Moveit2进阶
- 第 21 章 Moveit2真机控制
几乎每日更新的学习教程和资源,后台回复学习资料可获得大礼包

- 微信交流群:鱼香ROS公众号下方
- QQ交流群:139707339,进群指令(d2lros2+fishros)
记住网址:fish(鱼)+ros+.com=fishros.com
网罗各种机器人工具和资源

小鱼目前主要在做移动机器人导航相关的工作,坐标深圳,有时间的小伙伴周末一起来喝个茶。
因为小鱼个人能力有限,教程之中难免有错误之处,如果你有发现请联系小鱼或直接提出PR,小鱼将第一时间修正。
最后欢迎关注小鱼的微信公众号《鱼香ROS》,和小鱼一起学习ROS2。公众号下方有小鱼的个人微信和机器人技术交流群,有问题可以联系。
- ROS2官方文档:http://docs.ros.org/en/humble/index.html
- ROS2教学视频:https://www.bilibili.com/video/BV19U4y1n7CQ
- 项目源码地址:https://github.com/fishros/ros2_town
技术交流&&问题求助:
-
微信公众号及交流群:鱼香ROS
-
小鱼微信:AiIotRobot
-
QQ交流群:139707339
-
版权保护:已加入“维权骑士”(rightknights.com)的版权保护计划