title: X-bot date: 2021-10-23 21:41:29 tags: 写字机器人 categories: DIY
这个项目是我在稚辉君的视频里面看见的,是一个完全开源的项目,而且对他来说是一个比较简单的项目,但对于我这种没有什么DIY经验的同学来说,还是有点难的,不过可能我运气比较好吧,在他的视频评论区下面找到了一个大佬,他帮助了我很多,最后好像玩着玩着断断续续一直弄了1个多月才做好。
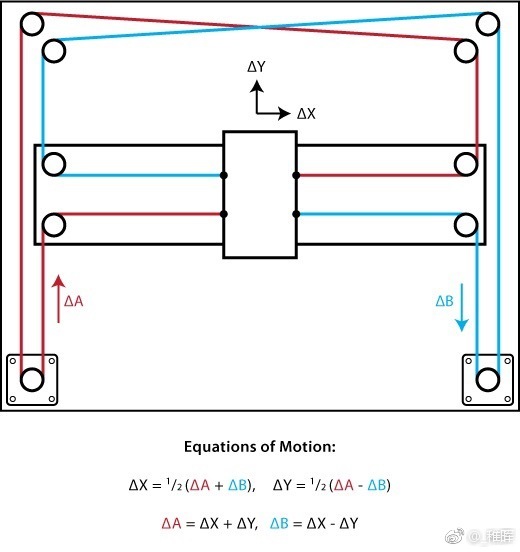
这个项目里面的机械结构叫做 CoreXY结构
这个项目采用的是GRBL GRBL是国外大牛编写的一套arduino单片机的G代码编译和运动控制的开源程序,而在这个项目里,稚辉君将GRBL移植到了STM32平台,可能当时在15年左右stm32比较便宜吧,性价比较高,而在现在2021的现在stm32的价格是以前的几倍不止/(ㄒoㄒ)/~~,话说回来,Grbl经常被用于DIY制作小型CNC调刻机或者写字机。
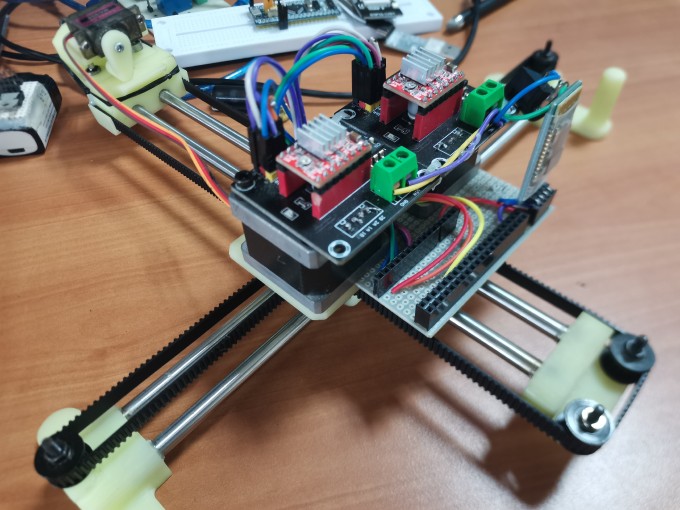
因为对于稚辉君还是追求极致性能不考虑成本的~,咱们还是得考虑成本的,所以一些地方做出了改变,其中有步进电机的驱动电路是用的A4988,也是DIY项目常用的驱动模块。然后因为现在的我也没有稚辉君那样的技术力,开始我也是采用的网上PCB打板后,然后在tb购买元器件,焊接完后,就是一直点亮不了 /(ㄒoㄒ)/~~,也检查了很久,最后就放弃了这个方案,换成了洞洞板。

我使用的上位机是评论区大佬分享给我的,是奎享免费版,比较低的版本,可能网上下载不到了,如果有人要的话,可以联系我。
这次的项目其实我的工作并不是很多,大多数代码,硬件,机械结构都是稚辉君开源的,可我应该还是学到一些东西的。 比如了解了GRBL这种控制方式,步进电机的使用,熟悉了蓝牙模块的使用,上位机的强大功能。 但这个项目有些地方我还是没有搞清楚,比如稚辉君是如何将GRBL从arduino移植到stm32的,这是个问题更多来源于我的技术不够,需要继续学习了解,还有稚辉君使用的上位机应该是他自己编写的,能够很好的适配。 所以,我准备还是得继续学习stm32这个平台,之前只是看了我们学校日常课程的内容,看来必须得继续学啊!同时计划学习c#编写上位机程序,那样以后也可以用unity,岂不美滋滋!!O(∩_∩)O 所以这就是这期博客的全部内容了。
希望和大家一起玩耍,能看到这里的都是人才啊🤣😂🤣😂,当然应该不太可能有人会看到这里哈,因为这个项目对于入行的大佬们确实实在是太简单了,而对于现在的我来说正好,所以其实我这里更多的是给自己的一个总结吧。