[TOC]
本系统使用ros控制双机械臂系统,实现了双机械臂的Gazebo仿真,以及连接并控制两台真实的UR10机器人。
dual_ur_description包是双机械臂系统的描述文件。包括urdf描述文件、meshes模型文件。以下是关键文件介绍:
-
dual_ur10_robot.urdf.xacro:双机械臂的描述文件。 -
dual_ur10_joint_limited_robot.urdf.xacro:带有关节限制的双机械臂的描述文件。 -
dual_ur_upload.launch:机械臂描述文件的加载程序,默认将无关节限制的描述文件加载到参数服务器的robot_description下,可以通过传入参数limited:=true更改默认行为。 -
display.launch:机器人模型的显示程序,通过运行以下命令可以在rviz中显示机器人模型,方括号内容可选。roslaunch dual_ur_description display.launch [limited:=true]
dual_ur_moveit_config是双机械臂的moveit!配置包,包含了进行运动规划所需的文件。
config/:
controllers.yaml:moveit!路径规划控制器的配置文件,表明运行moveit!时move_group节点会订阅left(right)_arm_controller/follow_joint_trajectory动作话题,注意保持前后一致。dual_ur.srdf:双机械臂模型结构的语义信息,记录了使用moveit_assistant进行的设置。一旦更改了机器人的模型,如添加末端抓手,就要重新调用moveit_assistant更新碰撞检测矩阵。
launch/:
-
dual_ur_moveit_planning_execution.launch:moveit!规划器的启动程序。实际上就是设置limited参数后再调用move_group.launch,因此以下两条命令等价:roslaunch dual_ur_moveit_config dual_ur_moveit_planning_execution.launch [limited:=true] roslaunch dual_ur_moveit_config move_group.launch [limited:=true]
-
move_group.launch:运动规划最重要的节点move_group的启动程序。它的调用层次结构如下图。首先调用一系列launch文件加载运动规划所需的配置文件,最后启动move_group节点。Loadinggraph TD aa(dual_ur_moveit_planning_execution.launch)-->a a(move_group.launch)-->b(planning_context.<br/>launch) a-->c(planning_pipeline.<br/>launch.xml) a-->d(trajectory_execution.<br/>launch.xml) a-->e(sensor_manager.<br/>launch.xml) b-->b1(load<br/>dual_ur10<_joint_limited>_<br/>robot.urdf.xacro,<br/>dual_ur.srdf,<br/>joint_limits.yaml,<br/>kinematics.yaml) c-->c1(ompl_planning_<br/>pipeline.launch.xml) c1-->c11(load<br/>ompl_planning.yaml) d-->d1(dual_ur_moveit_<br/>controller_manager.<br/>launch.xml) d1-->d11(load<br/>controllers.yaml) e-->e1(dual_ur_moveit_<br/>sensor_manager.<br/>launch.xml) e1-->e11(load<br/>sensors.yaml) b1-->z c11-->z d11-->z e11-->z z(run<br/>move_group) style b1 fill:#eea,stroke:#331,stroke-width:1px; style c11 fill:#eea,stroke:#331,stroke-width:1px; style d11 fill:#eea,stroke:#331,stroke-width:1px; style e11 fill:#eea,stroke:#331,stroke-width:1px; style z fill:#eee,stroke:#331,stroke-width:1px;
-
moveit_rviz.launch:启动rviz可视化运动规划。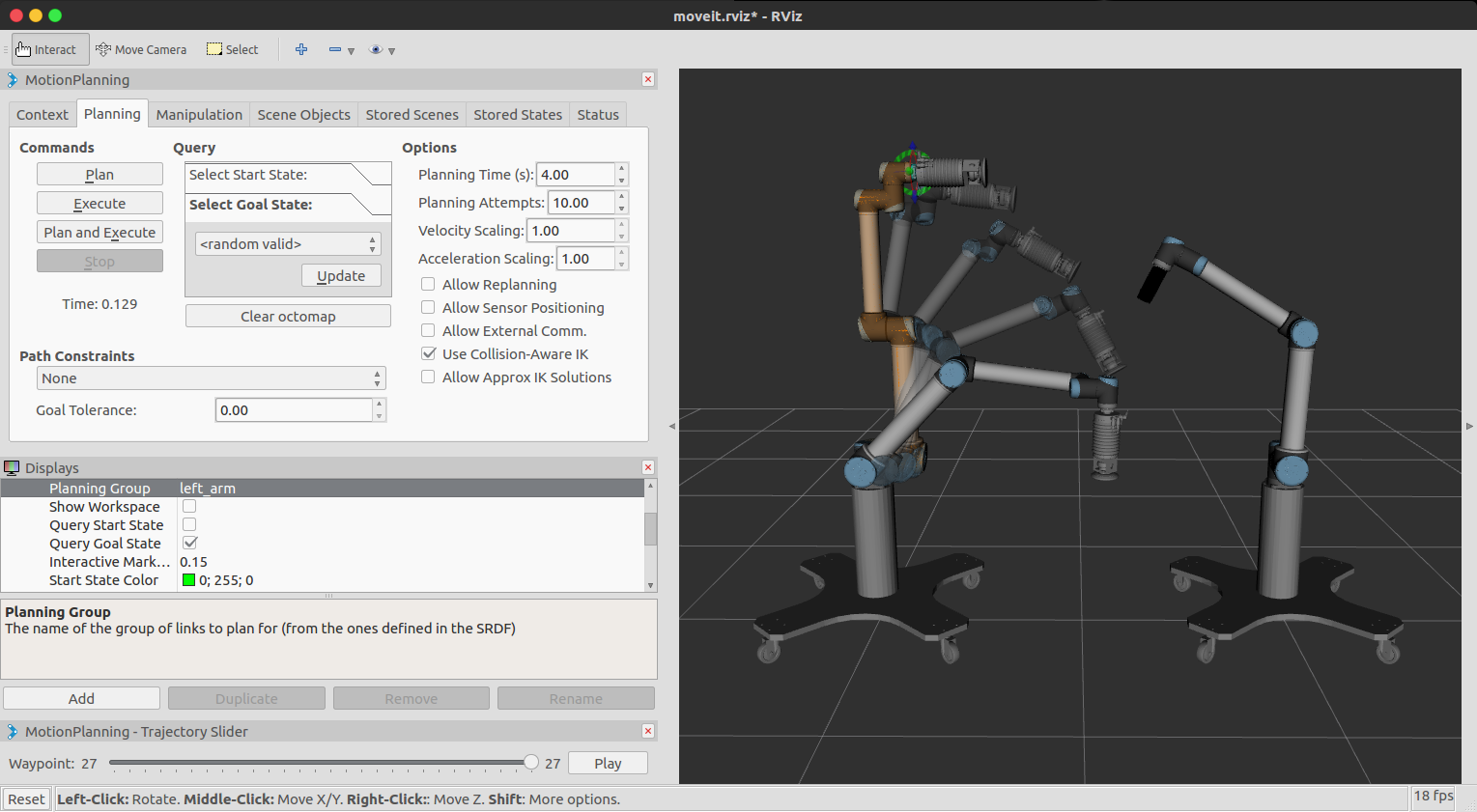
-
demo.launch:模拟的运动规划演示程序。

dual_ur_gazebo是双机械臂进行Gazebo仿真的配置包。
-
arm_contoller_dual_ur.yaml:仿真的控制器设置文件。要保证控制器的名字与dual_ur_moveit_config/controllers.yaml中的设置一致,这样才可以发布能被move_group正确订阅的action。 -
dual_ur.launch:仿真器的启动文件。它首先会调用dual_ur_description/dual_ur_upload.launch加载机器人的描述文件。使用时传入limited:=true参数选择使用有关节限制的模型。Loadinggraph TD a(dual_ur.launch)-->b(gazebo_ros/<br/>empty_world.launch) a-->c(dual_ur_upload<br/>.launch) b-->d(run<br/>spawn_model) c-->d a-->e(controller_utils.launch) e-->e1(run<br/>robot_state_<br/>publisher) e-->e2(load<br/>joint_state_<br/>controller.yaml) e2-->e21(run<br/>joint_state_<br/>controller_spawner) a-->f(load<br/>arm_controller_dual_ur.yaml) f-->f1(run<br/>left_arm_controller_spawner<br/>right_arm_controller_spawner) style f fill:#eea,stroke:#331,stroke-width:1px; style e2 fill:#eea,stroke:#331,stroke-width:1px; style e1 fill:#eee,stroke:#331,stroke-width:1px; style f1 fill:#eee,stroke:#331,stroke-width:1px; style e21 fill:#eee,stroke:#331,stroke-width:1px; style d fill:#eee,stroke:#331,stroke-width:1px;
ur_modern_driver是真实机器人的驱动包,负责与真实的机械臂建立连接,并提供接口给moveit!。
-
dual_ur_bringup.launch:与两台UR10建立连接的驱动程序。主要内容为启动两个ur_driver节点,分别驱动两个ur10机械臂。需要注意的是,在每个节点启动时,要将控制器动作(action)话题remap到dual_ur_moveit_config/controllers.yaml中设置的控制器动作话题中,例如:<node name="left_ur_driver" pkg="ur_modern_driver" type="ur_driver" output="screen"> <remap from="/follow_joint_trajectory" to="/left_arm_controller/follow_joint_trajectory"/> </node>
其次,因为要建立TCP/IP连接,所以需要将两台机器人和电脑连入同一局域网下,并且设置ip地址,注意电脑两台机器人的通信的端口号要不同,这些参数在文件开头即可设置:
<!-- 驱动器参数 --> <arg default="left_" name="left_prefix"/> <arg default="right_" name="right_prefix"/> <arg default="192.168.1.102" name="left_robot_ip"/> <arg default="192.168.1.103" name="right_robot_ip"/> <arg default="192.168.1.2" name="reverse_ip"/> <arg default="50001" name="left_reverse_port"/> <arg default="50002" name="right_reverse_port"/>
另外,也可以传入
limited参数决定是否使用限制关节的模型,默认为true。
依次运行以下命令,接着即可使用rviz的可视化界面进行运动规划仿真。
# 启动Gazebo仿真器
roslaunch dual_ur_gazebo dual_ur.launch limited:=true
# 启动move_group
roslaunch dual_ur_moveit_config dual_ur_moveit_planning_execution.launch limited:=true
# 启动rviz可视化运动规划
roslaunch dual_ur_moveit_config moveit_rviz.launch 
依次运行以下命令,接着即可使用rviz的可视化界面控制真实的双UR10机械臂系统。
# 与双机械臂建立连接
roslaunch ur_modern_driver dual_ur_bringup.launch
# 启动move_group
roslaunch dual_ur_moveit_config dual_ur_moveit_planning_execution.launch limited:=true
# 启动rviz可视化运动规划
roslaunch dual_ur_moveit_config moveit_rviz.launch 启动顺利的节点图:

rviz可视化界面与真实机器人:

