A comprehensive list of categorized reinforcement learning environments.
Started and maintained by Andrew Szot.
Two other resources for RL environments:
Environments are listed alphabetically.
|
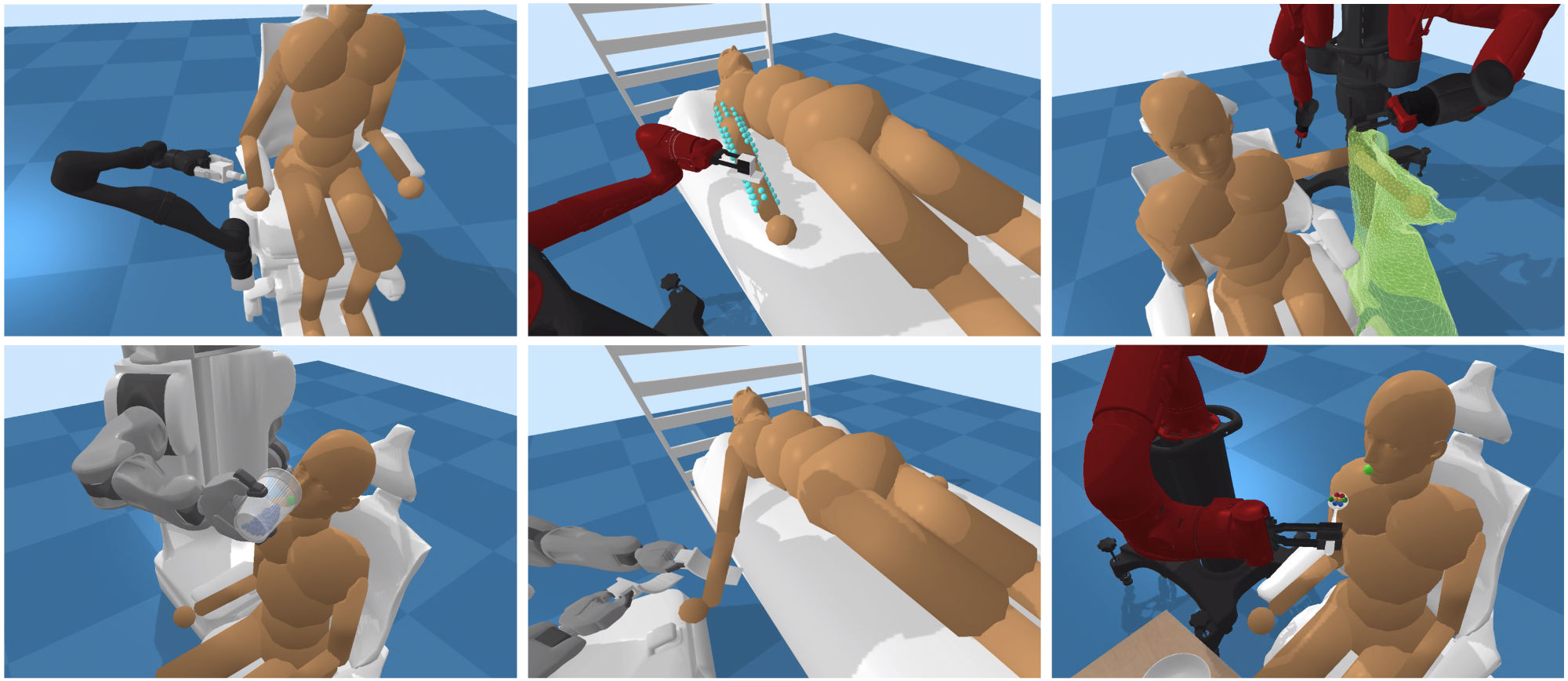
Assistive-gym
-
6 assistive tasks (ScratchItch, BedBathing, Feeding, Drinking, Dressing, and ArmManipulation).
-
4 commercial robots (PR2, Jaco, Baxter, Sawyer).
-
2 human states: static or active (takes actions according to a separate control policy).
-
Customizable female and male human models. 40 actuated human joints (head, torso, arms, waist, and legs).Realistic human joint limit.
|
|
DoorGym
-
Train a policy to open up various doors.
-
Unity integration.
-
Random door knob generator and door knob dataset.
|
|
Gym Gazebo 2
-
Toolkit for developing and comparing reinforcement learning algorithms using ROS 2 and Gazebo.
|
|
|
Gym Ignition
-
Provides the capability of creating reproducible robotics environments for reinforcement learning research.
-
Accelerated and multiprocess execution
|
|
IKEA Furniture Assembly
-
Complex long-horizon manipulation tasks.
-
Includes 80+ furniture models, customizable background, lighting
and textures.
-
Features Baxter, Sawyer, and more robots.
|
|
Meta-World
-
50 diverse robot manipulation tasks on a simulated Sawyer robotic arm.
-
Also includes a variety of evaluation modes varying the number of training and testing tasks.
|
|
Playroom
-
Variety of tasks in desk scenario.
-
Evaluation code and play dataset will be included soon.
|
|
RAISIM
-
Raisim is a physics engine for rigid-body dynamics simulation.
Although it is a general physics engine, it has been mainly
used/tested for robotics and reinforcement learning so far. It
features an efficient implementation of recursive algorithms for
articulated system dynamics (Recursive Newton-Euler and Composite
Rigid Body Algorithm). RaisimLib is an exported cmake package of
raisim.
|
|
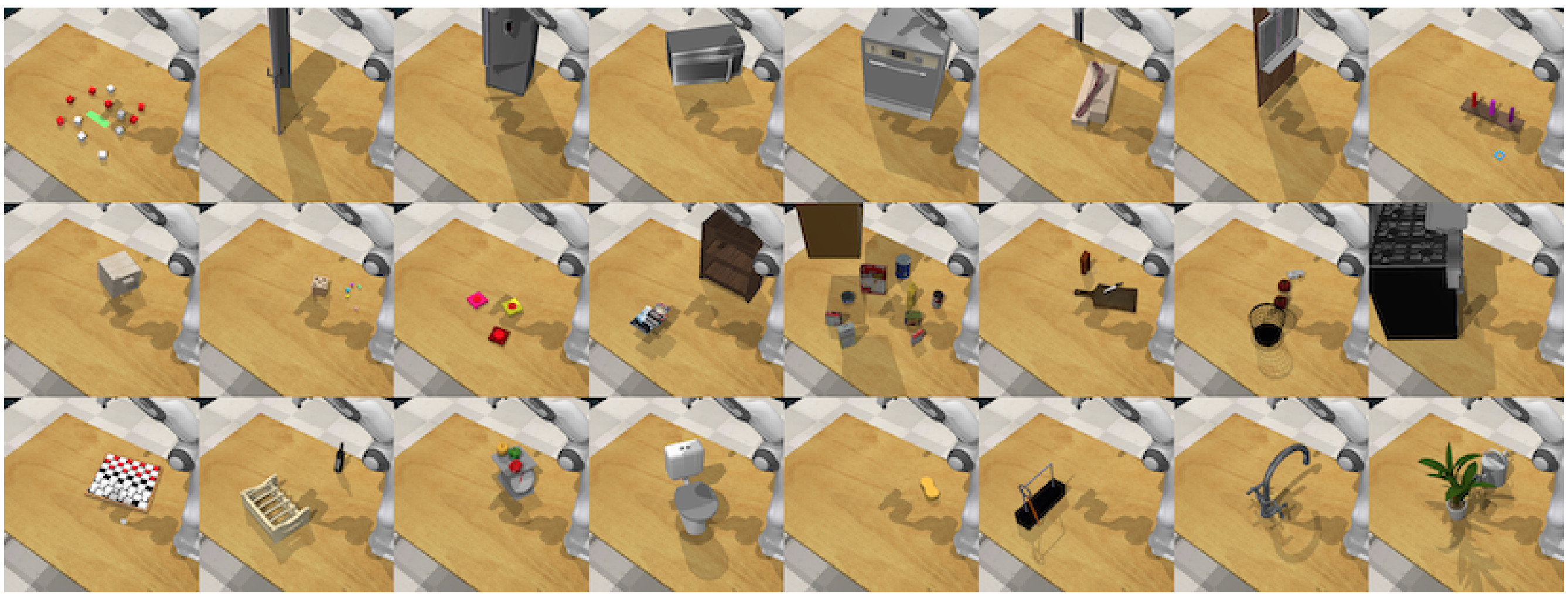
RLBench
-
100 unique, hand designed tasks.
-
Vision-guided manipulation, imitation learning, multi-task
learning, geometric computer vision and few-shot learning.
|
|
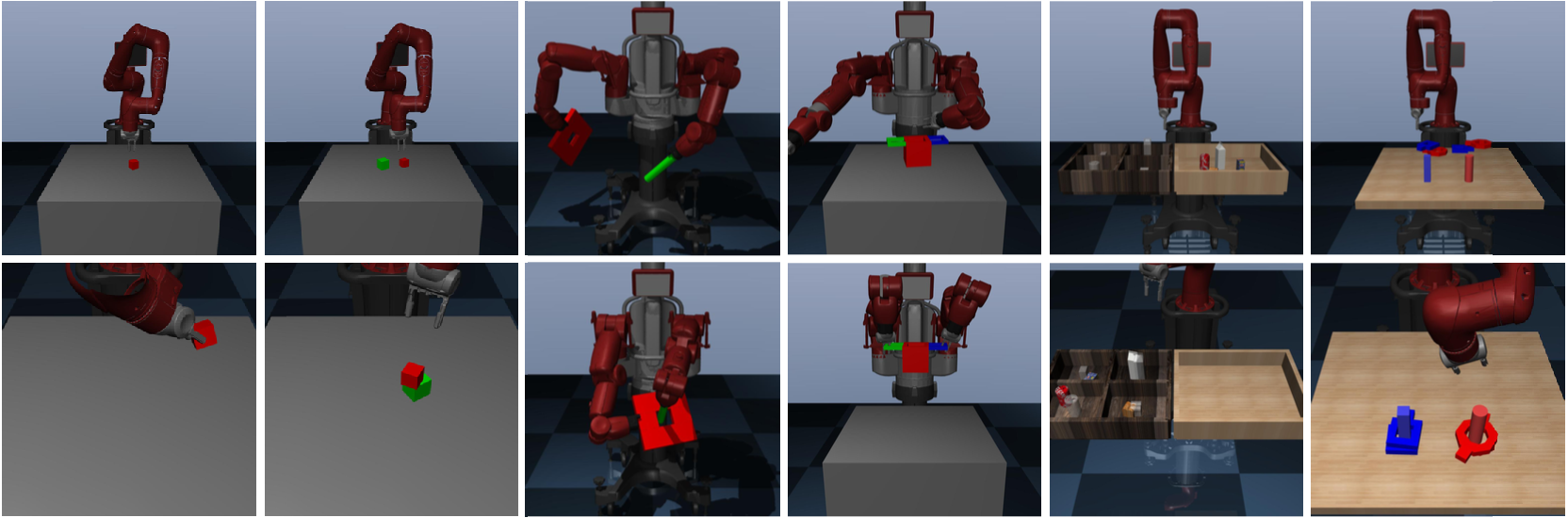
Robosuite
-
A set of standard benchmarking tasks in robots.
-
Defines a framework for easily creating new tasks and environments.
|
|
Roboschool
-
Control robots in simulation.
-
Can use other physics engines other than MuJoCo.
-
Alternative to standard OpenAI Gym mujoco environments.
-
Easy to train multiple agents at once.
|
|
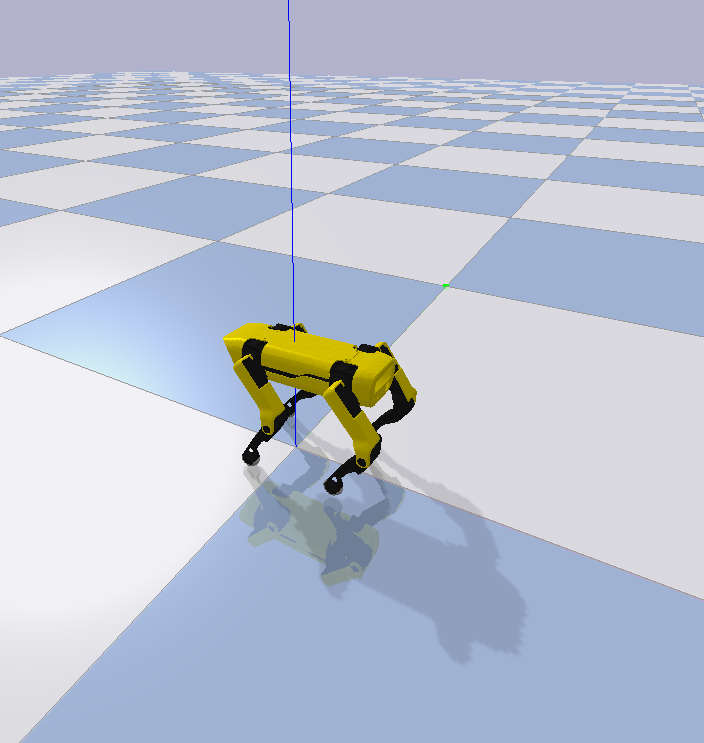
Rex-Gym
-
OpenAI Gym environments for an open-source quadruped robot (SpotMicro)
|
|
Coin-Run
-
Training environment which provides a metric for an agent’s
ability to transfer its experience to novel situations.
|
|
Gym Retro
-
Gym Retro lets you turn classic video games into Gym environments
for reinforcement learning and comes with integrations for ~1000.
games.
|

|
Holodeck
-
High Fidelity Simulator for Reinforcement Learning and Robotics Research.
|

|
MarLÖ : Reinforcement Learning + Minecraft
-
A high level API built on top of Project MalmÖ to facilitate Reinforcement Learning experiments with a great degree of generalizability, capable of solving problems in pseudo-random, procedurally changing single and multi agent environments within the world of the mediatic phenomenon game Minecraft.
|

|
Minecraft
-
Data API for the MineRLv0 dataset.
-
Also has minecraft environment simulator with basic built in tasks.
|
|
PHYRE
-
Benchmark for physical reasoning that contains a set of simple classical mechanics puzzles in a 2D enviroment.
|

|
Soccer Simulator
-
Can control one or all football players at a time.
-
Includes football academy for diverse scenarios such as various
passing scenarios.
|

|
StarCraft 2
-
Provides an interface for RL agents to interact with StarCraft 2,
getting observations and sending actions.
|
|
|
SuperMario
-
Gym wrapper for the Super Mario levels. Includes many levels.
|
|
|
TorchCraft
-
Python interface for playing "StarCraft: Brood War".
|

|
VizDoom
-
ViZDoom allows developing AI bots that play Doom using only the
visual information (the screen buffer).
|
|
|
Meta-World
-
50 diverse robot manipulation tasks on a simulated Sawyer robotic arm.
-
Also includes a variety of evaluation modes varying the number of training and testing tasks.
|
|
|
Multiworld
-
Variety of Gym GoalEnvs that return the goal in the observation.
|
|
|
Playroom
-
Variety of tasks in desk scenario.
-
Evaluation code and play dataset will be included soon.
|
|
|
RLBench
-
100 unique, hand designed tasks.
-
Vision-guided manipulation, imitation learning, multi-task
learning, geometric computer vision and few-shot learning.
|
|
Cartpole Generalization
-
Test generalization through varying the mass and length of the pole
in CartPole.
|
|
Natural RL Environment
-
Play common gym tasks with randomly generated backgrounds to test
generalization.
|

|
Procgen
-
16 simple-to-use procedurally-generated environments which provide
a direct measure of how quickly a reinforcement learning agent
learns generalizable skills.
-
The environments run at high speed (thousands of steps per second)
on a single core.
|
|
Animal-AI Testbed
-
900 tasks reflecting various cognitive skills of animals.
-
Powered by Unity ml-agent.
|

|
DeepMind Lab
-
Provides a suite of challenging 3D navigation and puzzle-solving
tasks for learning agents.
|
|
gym-maze
-
A simple 2D maze environment where an agent (blue dot) finds its
way from the top left corner (blue square) to the goal at the
bottom right corner (red square).
-
The objective is to find the
shortest path from the start to the goal.
|
|
gym-minigrid
-
Lightweight and fast grid world implementation with various
included tasks.
-
Easily modifable and extendable.
|
|
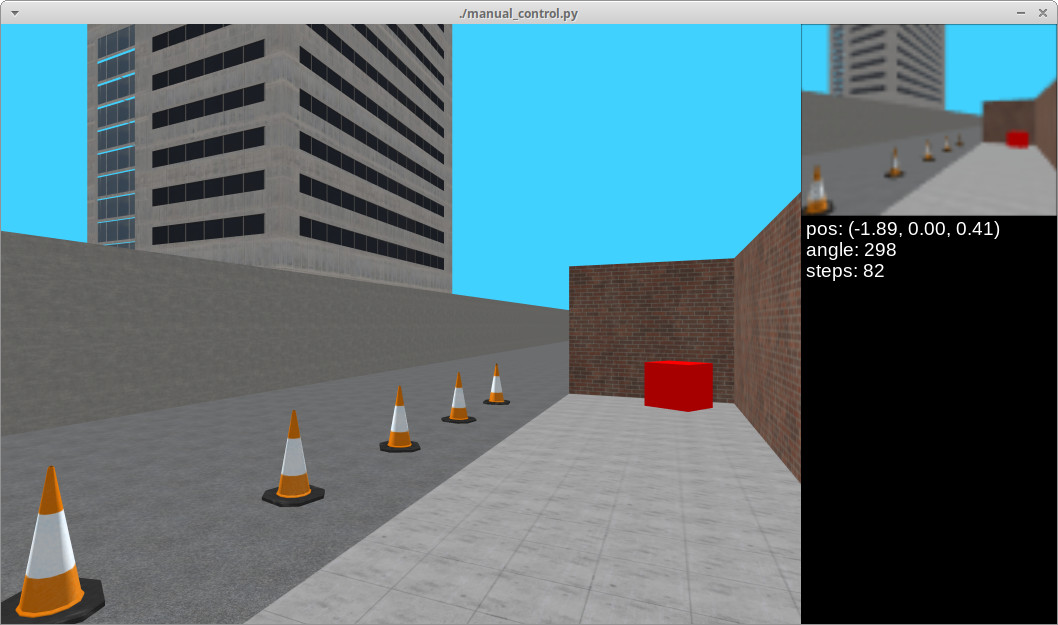
gym-miniworld
-
Minimalistic 3D interior simulator as an alternative to VizDoom or
DMLab.
-
Easily modifable and extendable.
|
|
Obstacle Tower
-
Traverse through procedurally generated floors which get progressively harder.
-
Challenging visual inputs.
|

|
AI2THOR
-
An Interactive 3D Environment for Visual AI
|
|
Gibson
-
3d navigation in indoor scans
|
|
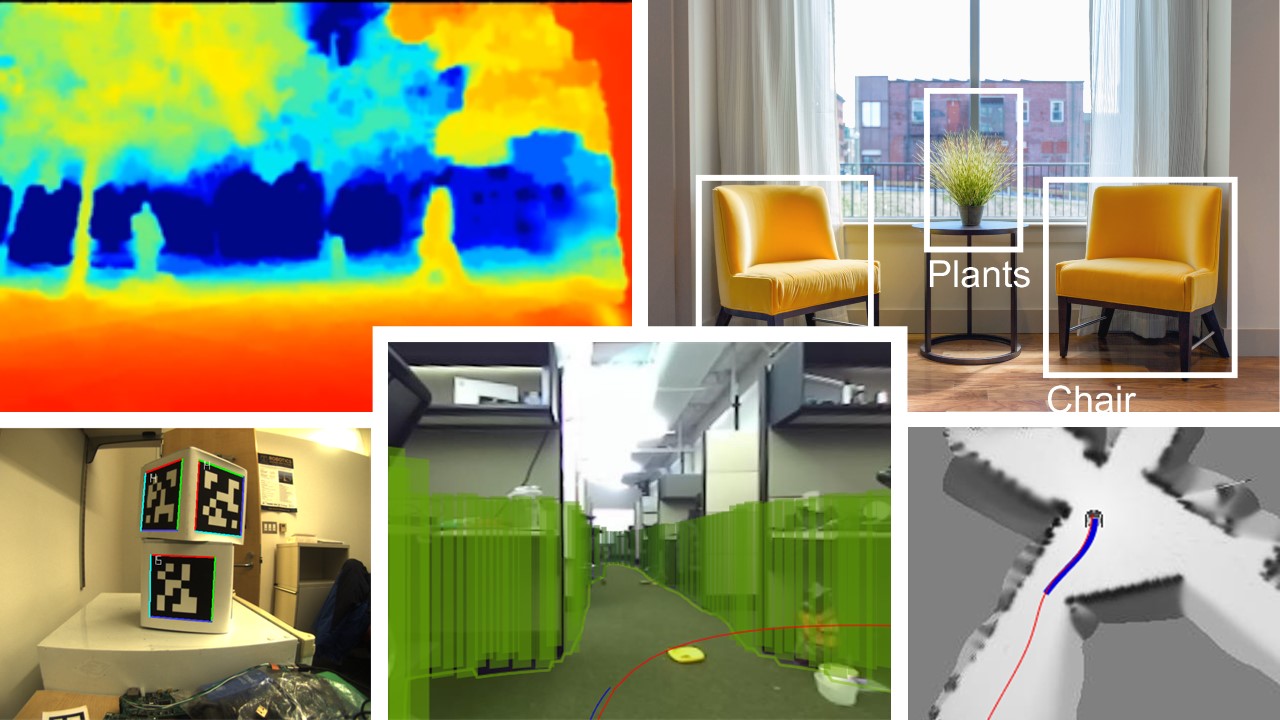
Habitat
-
AI Habitat enables training of embodied AI agents (virtual robots)
in a highly photorealistic & efficient 3D simulator, before
transferring the learned skills to reality
|
|
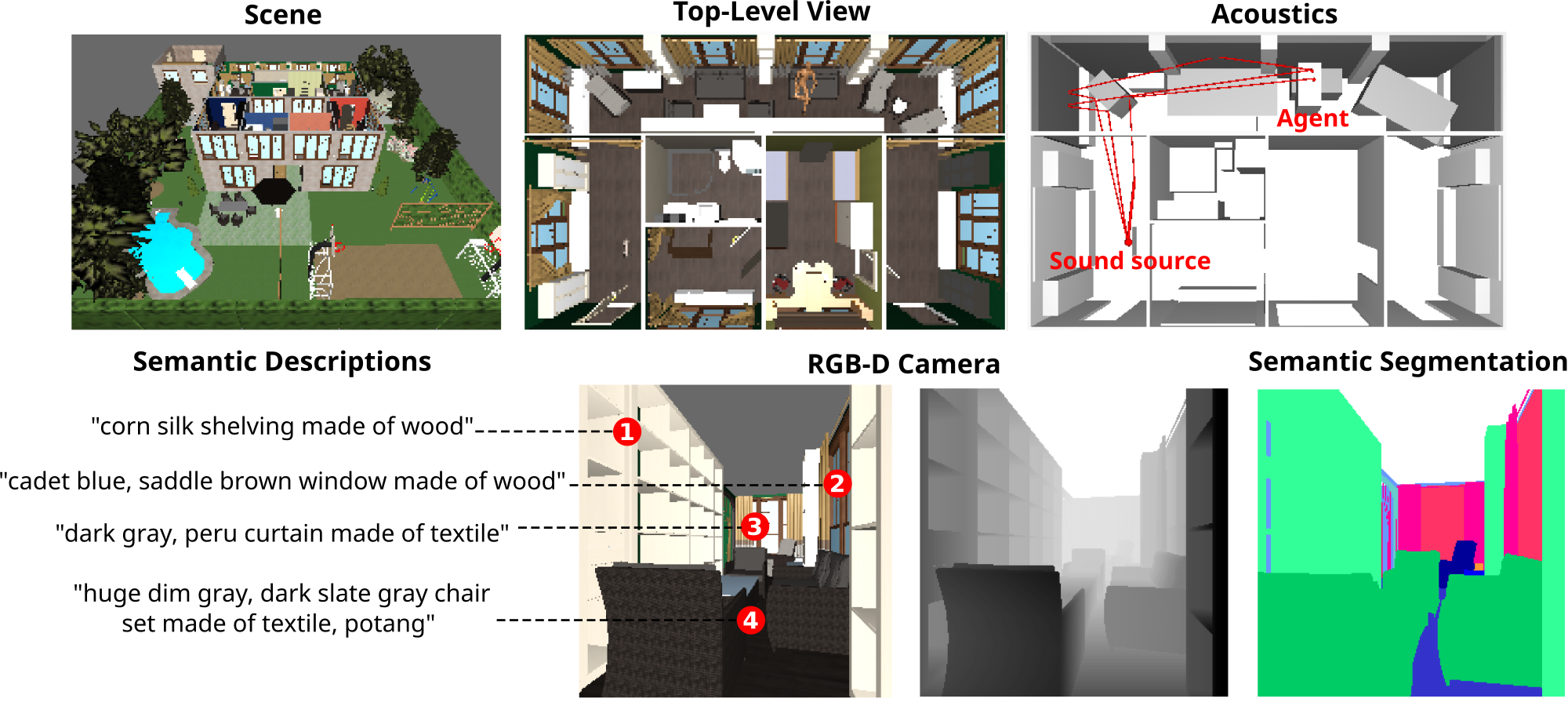
HoME: a Household Multimodal Environment
-
A platform for agents to learn from vision, audio, semantics, physics, and interaction with objects and other agents, all within a realistic context.
|

|
House3D
-
House3D is a virtual 3D environment which consists of thousands of
indoor scenes equipped with a diverse set of scene types, layouts
and objects sourced from the SUNCG dataset
-
It consists of over 45k indoor 3D scenes, ranging from studios to
two-storied houses with swimming pools and fitness rooms
-
All 3D objects are fully annotated with category labels
-
Multiple observation modalities
-
Fast rendering at thousands of frames per second
|

|
MINOS
-
MINOS is a simulator designed to support the development of
multisensory models for goal-directed navigation in complex indoor
environments.
-
MINOS leverages large datasets of complex 3D environments and
supports flexible configuration of multimodal sensor suites.
|
|
Nvidia ISAAC simulator
-
A virtual robotics laboratory and a high-fidelity 3D world simulator
|
|
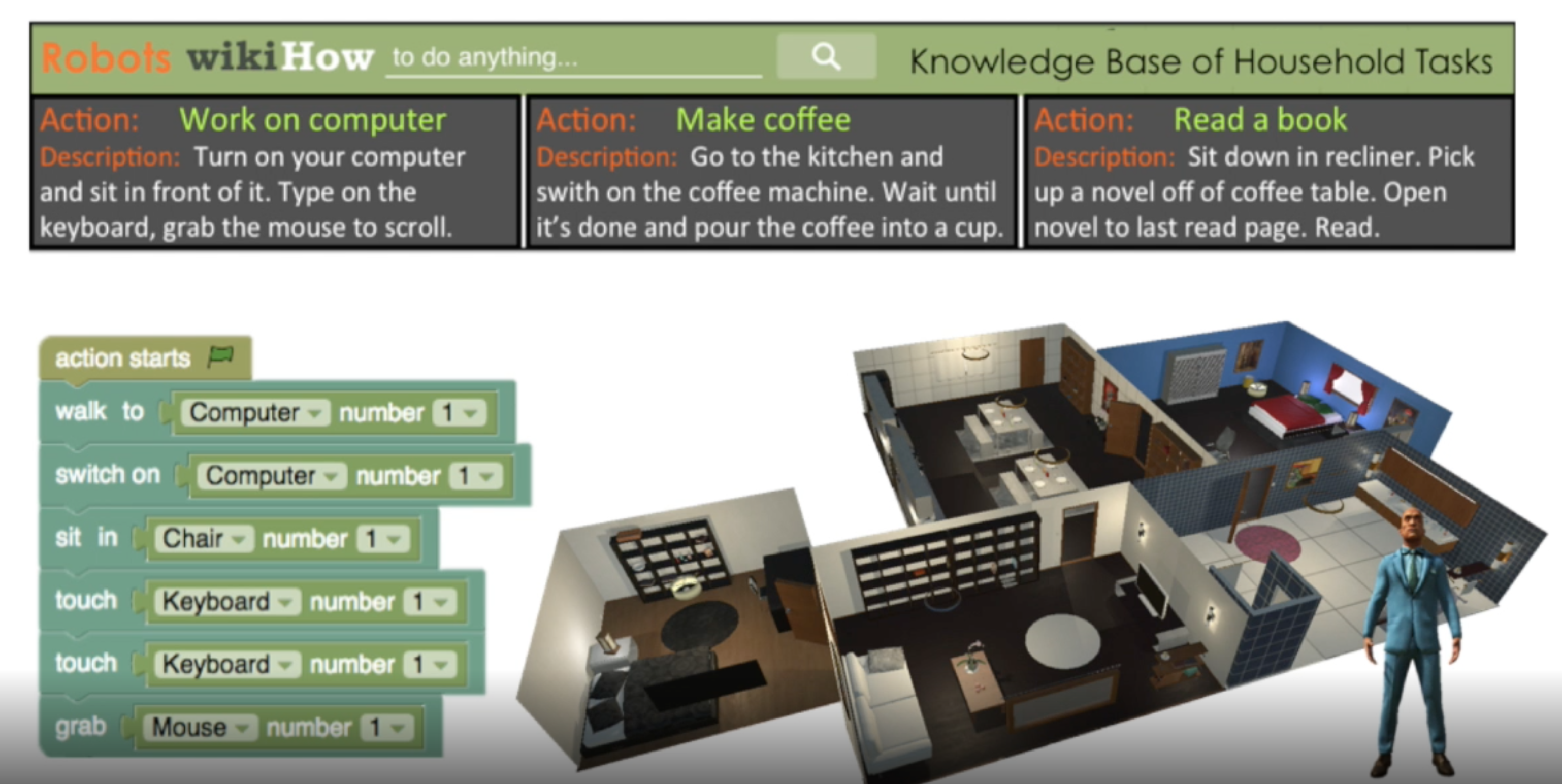
VirtualHome
-
A 3D environment allowing to simulate and generate videos of activities as sequences of actions and interaction.
|
|
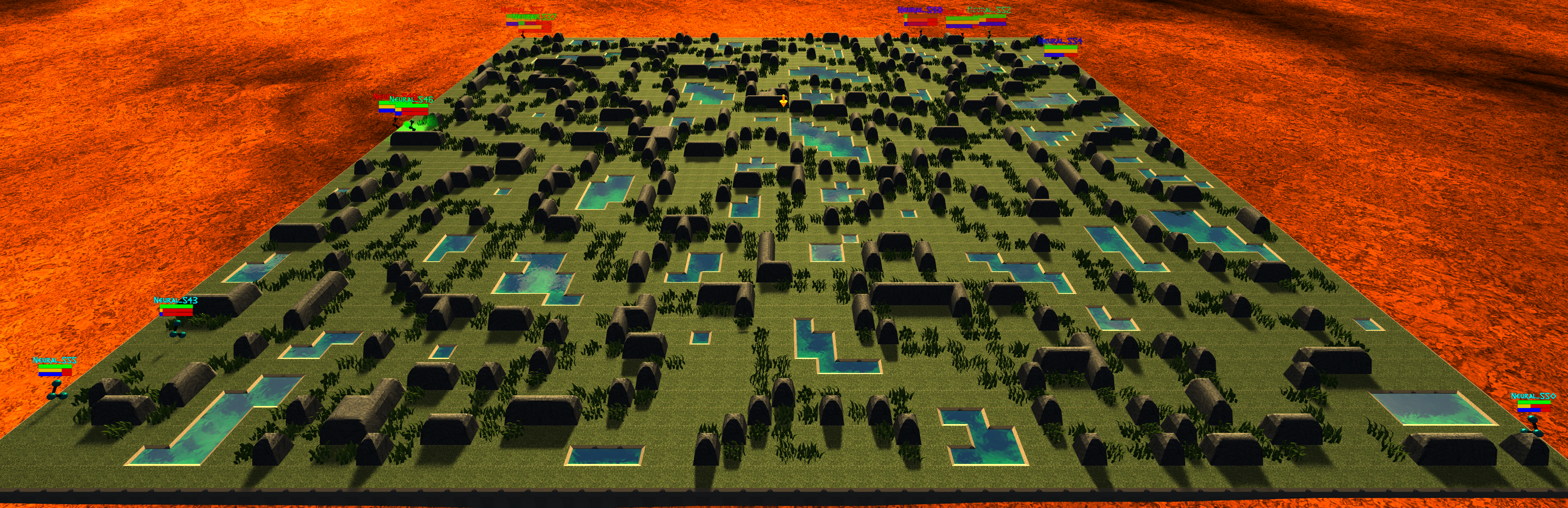
Massive Multi Agent Game Environment
-
We consider MMORPGs (Massive
Multiplayer Online Role Playing Games) the best proxy for the real
world among human games: they are complete macrocosms featuring
thousands of agents per persistent world, diverse skilling systems,
global economies, complex emergent social structures, and ad-hoc
high stakes single and team based conflict.
|
|
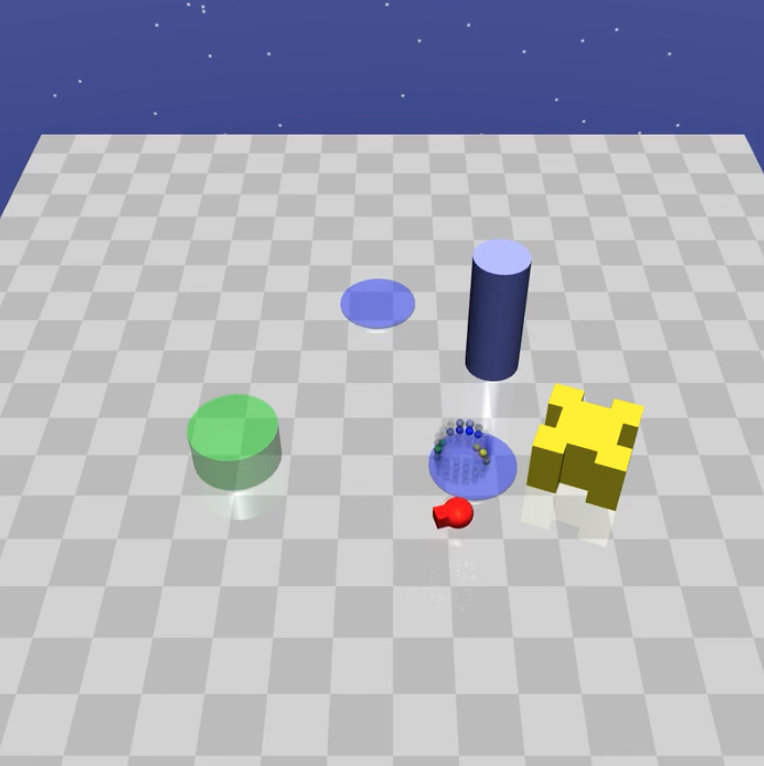
Multi-agent Particle Environment
-
A simple multi-agent particle world with a continuous observation and discrete action space, along with some basic simulated physics
|

|
OpenAI Multi-Agent Competition Environments
-
Contains many continous control, multi-agent tasks.
|
|
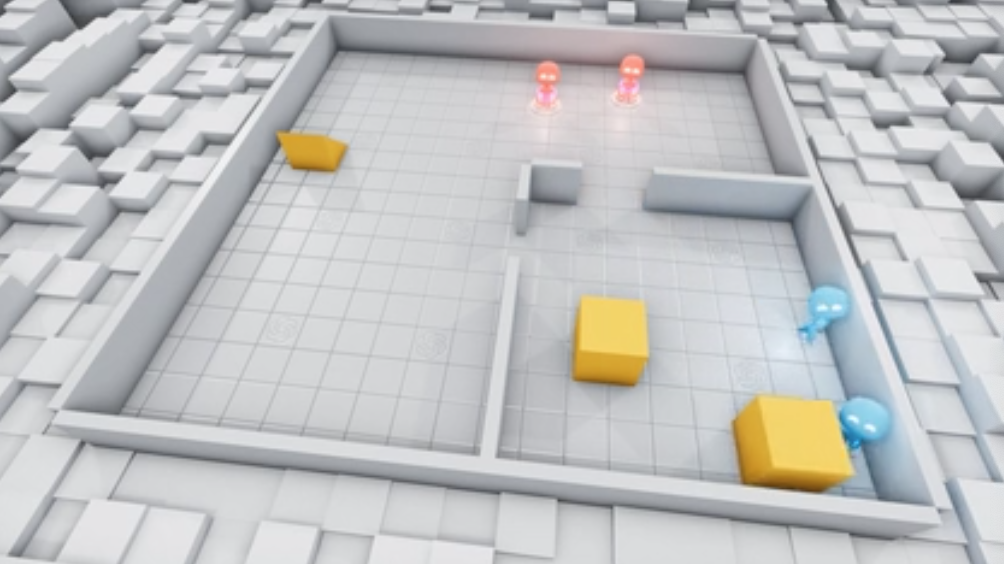
OpenAI Multi-Agent Hide and Seek
-
A team of seekers and a team of hiders.
-
Both teams can use tools to achieve their objective.
|
|
RoboSumo
-
Sumo-wrestling between two ants using continuous control.
|
|
|
Assistive-gym
-
6 assistive tasks (ScratchItch, BedBathing, Feeding, Drinking, Dressing, and ArmManipulation).
-
4 commercial robots (PR2, Jaco, Baxter, Sawyer).
-
2 human states: static or active (takes actions according to a separate control policy).
-
Customizable female and male human models. 40 actuated human joints (head, torso, arms, waist, and legs).Realistic human joint limit.
|
|
|
DeepMind AI Safety Gridworlds
-
This is a suite of reinforcement learning environments illustrating
various safety properties of intelligent agents.
|
|
Safety Gym
-
Tools for accelerating safe exploration research.
|
|
Autonomous Vehicle Simulator
-
Open source simulator for autonomous vehicles built on Unreal Engine
/ Unity, from Microsoft AI & Research
|
|
BARK-ML
-
Open source environments and reinforcement learning agents
for autonomous driving and behavior generation.
|
|
CARLA
-
CARLA has been developed from the ground up to support development,
training, and validation of autonomous driving systems
|

|
DeepDrive Self Driving Car Simulator
-
End-to-end simulation for self-driving cars
|
|
DeepMind StreetLearn
-
A C++/Python implementation of the StreetLearn environment based on
images from Street View, as well as a TensorFlow implementation of
goal-driven navigation agents solving the task published in “Learning
to Navigate in Cities Without a Map”, NeurIPS 2018
|

|
DeepGTAV v2
-
A plugin for GTAV that transforms it into a vision-based self-driving
car research environment.
|

|
DuckieTown
-
Self-driving car simulator for the Duckietown universe.
|
|
Highway-Env
-
A collection of environments for autonomous driving and tactical
decision-making tasks
|

|
SVL Simulator
-
Simulation software to accelerate safe autonomous vehicle development
-
Custom environment to support openai gym interface
|

|
TORCS
-
TORCS, The Open Racing Car Simulator is a highly portable multi
platform car racing simulation
-
Many tracks, opponents and cars available
-
Easy to modify
|
|
Full Body Muscle Simulator
-
A basic simulation and control for full-body Musculoskeletal system
|
|
Osim-rl
-
Reinforcement learning environments with musculoskeletal models. Task: learning to walk/move/run using musculoskeletal models.
|
|
|
Roboschool
-
Control robots in simulation.
-
Can use other physics engines other than MuJoCo.
-
Alternative to standard OpenAI Gym mujoco environments.
-
Easy to train multiple agents at once.
|

|
Jericho
-
A learning environment for man-made Interactive Fiction games.
|
|
|
TextWorld
-
TextWorld is a sandbox learning environment for the training
and evaluation of reinforcement learning (RL) agents on text-based
games.
|
|
|
Reco Gym
-
Reinforcement Learning Environment for the problem of Product Recommendation in Online Advertising.
|
|
|
RecSim
-
A Configurable Recommender Systems Simulation Platform from Google.
|
The list is not comprehensive, so please let us know if there is any environment that is missing, miscategorized, or needs a different description or image. Please submit an issue or open a pull request.





























































