The LiDAR tracking library, for tracking objects obtaining from segmentation-based detection and improve segmentation.


- We name your ros workspace as
CATKIN_WSandgit cloneas a ROS package.$ cd $(CATKIN_WS) # we recommand you to organize your workspace as following $ mkdir -p src/perception/libs # git clone basic common libraries $ cd $(CATKIN_WS)/src/ $ git clone https://github.com/LidarPerception/common_lib.git common # git clone perception libraries, tracking_lib and its dependencies $ cd $(CATKIN_WS)/src/perception/libs $ git clone https://github.com/LidarPerception/roi_filters_lib.git roi_filters $ git clone https://github.com/LidarPerception/object_builders_lib.git object_builders $ git clone https://github.com/LidarPerception/segmenters_lib.git segmenters $ git clone https://github.com/LidarPerception/feature_extractors_lib.git feature_extractors $ git clone https://github.com/LidarPerception/tracking_lib.git tracking # build your ros workspace for our Tracking-help segmentation demo $ cd $(CATKIN_WS) $ catkin build -DCMAKE_BUILD_TYPE=Release
- Run demo under KiTTI raw dataset using kitti_ros's replayer.
- Terminal 1: KiTTI raw dataset replay, more tutorials.
$ cd $(CATKIN_WS) $ source devel/setup.bash # change Mode for Keyboard Listening Device $ sudo chmod 777 /dev/input/event3 # launch kitti_ros's kitti_player for frame-by-frame algorithm testing $ roslaunch kitti_ros kitti_player.launch kitti_data_path:=<path-to-your-downloaded-raw-dataset> fps:=1
- Terminal 2: launch Tracking-help Segmentation demo.
$ cd $(CATKIN_WS) $ source devel/setup.bash $ roslaunch tracking_lib demo.launch
- Terminal 1: KiTTI raw dataset replay, more tutorials.
detection.yaml and tracking.yaml configure the detection_node and tracking_node in sample. kitti/*.yaml configure the algorithm parameters for KiTTI Dataset, Segmenter.yaml and TrackingWorker.yaml separately for Seg-based Segmentation, Tracking.
./config
├── detection.yaml
├── kitti
│ ├── Segmenter.yaml
│ └── TrackingWorker.yaml
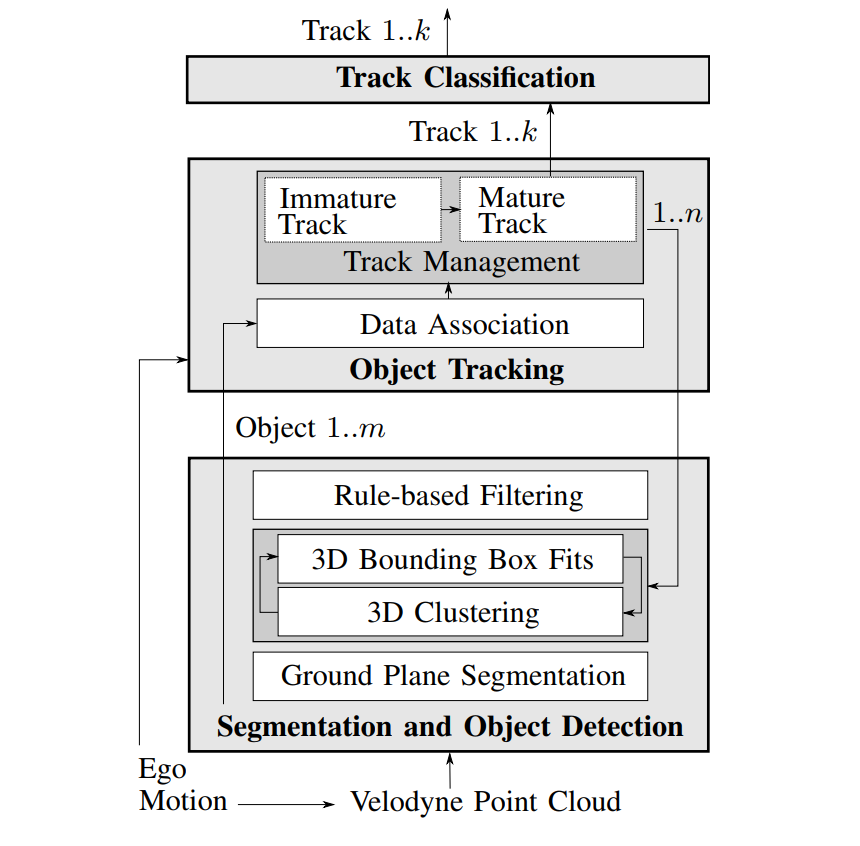
└── tracking.yaml- Tracking-help Segmentation. IV, 2012. A basic implementation in tracking_node
@inproceedings{himmelsbach2012tracking, title={Tracking and classification of arbitrary objects with bottom-up/top-down detection}, author={Himmelsbach, Michael and Wuensche, H-J}, booktitle={Intelligent Vehicles Symposium (IV), 2012 IEEE}, pages={577--582}, year={2012}, organization={IEEE} }