全国大学生智能汽车竞赛-完全模型组-开源共享软件资源(Edgeboard-FZ3B)
严肃声明!!该软件方案仅限智能汽车竞赛学习交流,本人基于智能车爱好者维度向公众公开源代码,不涉及任何商业行为,请全体技术爱好者共同监督指导!!!
同时将继续汇集历届经验,持续为大家共享相关资源,欢迎批评改进,未完待续!!!

注意:该版本不包含所有功能块,部分内容需要各位参赛选手继续搭建...(环岛/加油站/泛行区)
- 该软件工程基于C++/OpenCV2/Python2.7/PaddlePaddle-Detection搭建;
- 基于百度智能汽车-完全模型组及赛事开源Edgeboard板卡FZ3B调试开发;
- 默认将该软件下载到EB:root@EdgeBoard:~/workspace目录下即可启用;
- 除此之外,该软件支持仿真调试(跑视频)/比赛模式两种方式运行;


-
编译代码/Make
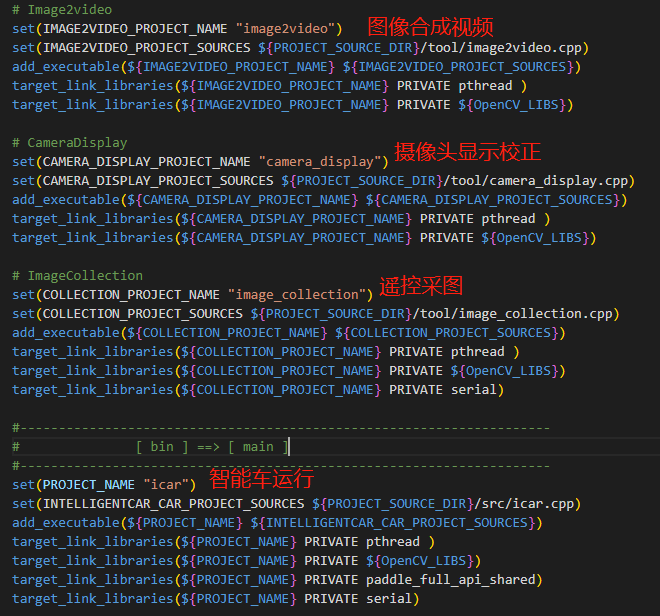
编码可执行程序,可修改CMakeLists.txt;
到build路径下cmake:
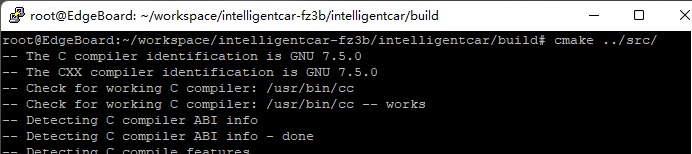
编译代码:

-
修改config文件,启动相关模式
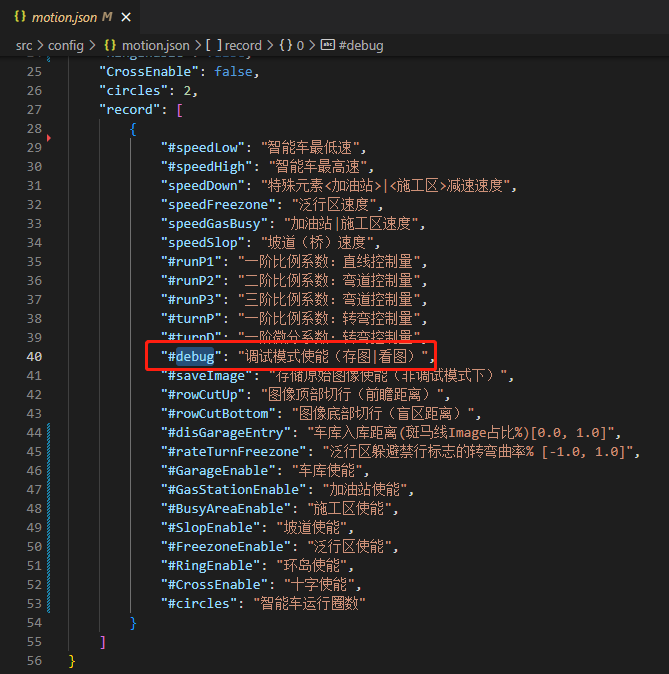
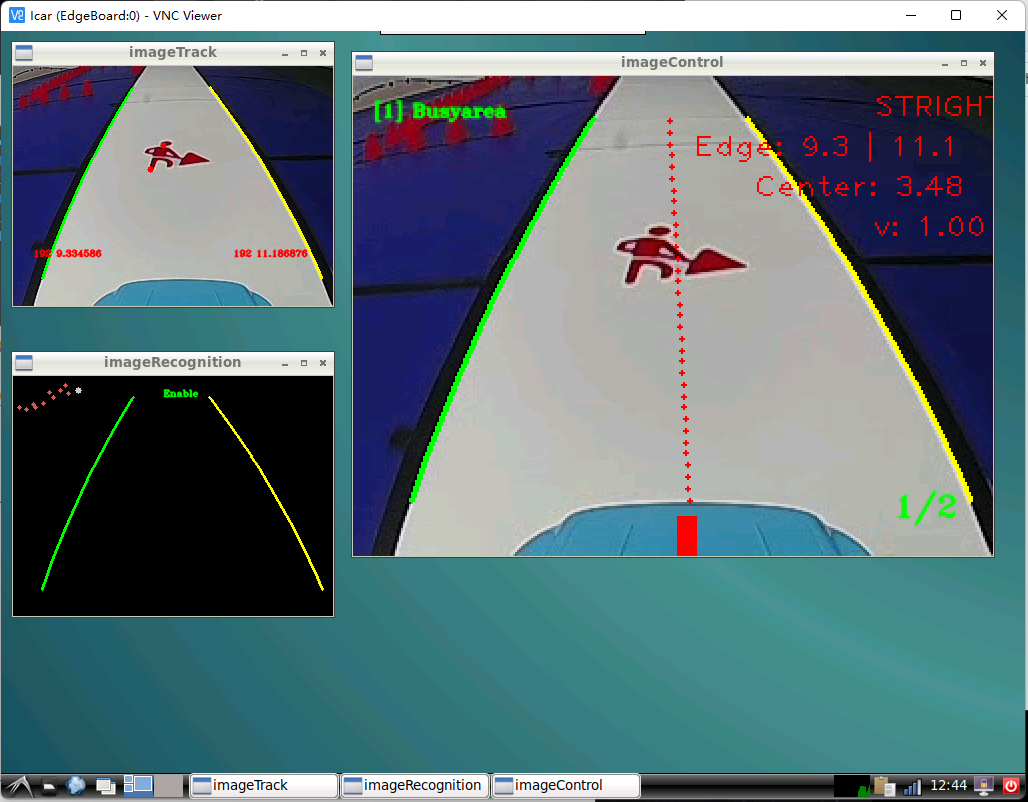
修改motion.json文件后,不必再次编译即可运行,方便后期调试。可通过debug标志启动仿真(跑视频)模式和比赛(竞速)模式,仿真模式下默认调取本地视频,并且通过VNC观察实时图像运算结果;比赛模式将关闭图像显示和图形绘制(省时间/10ms)。
-
连接下位机,启动程序
运行icar程序需要连接下位机,否则程序退出,插入ch340/cp2102的USB串口即可。
-
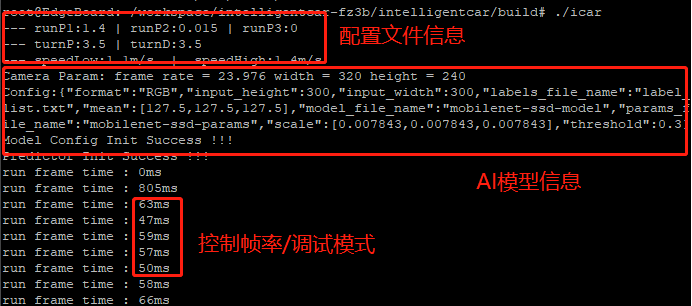
查看运行结果(debug模式)
-
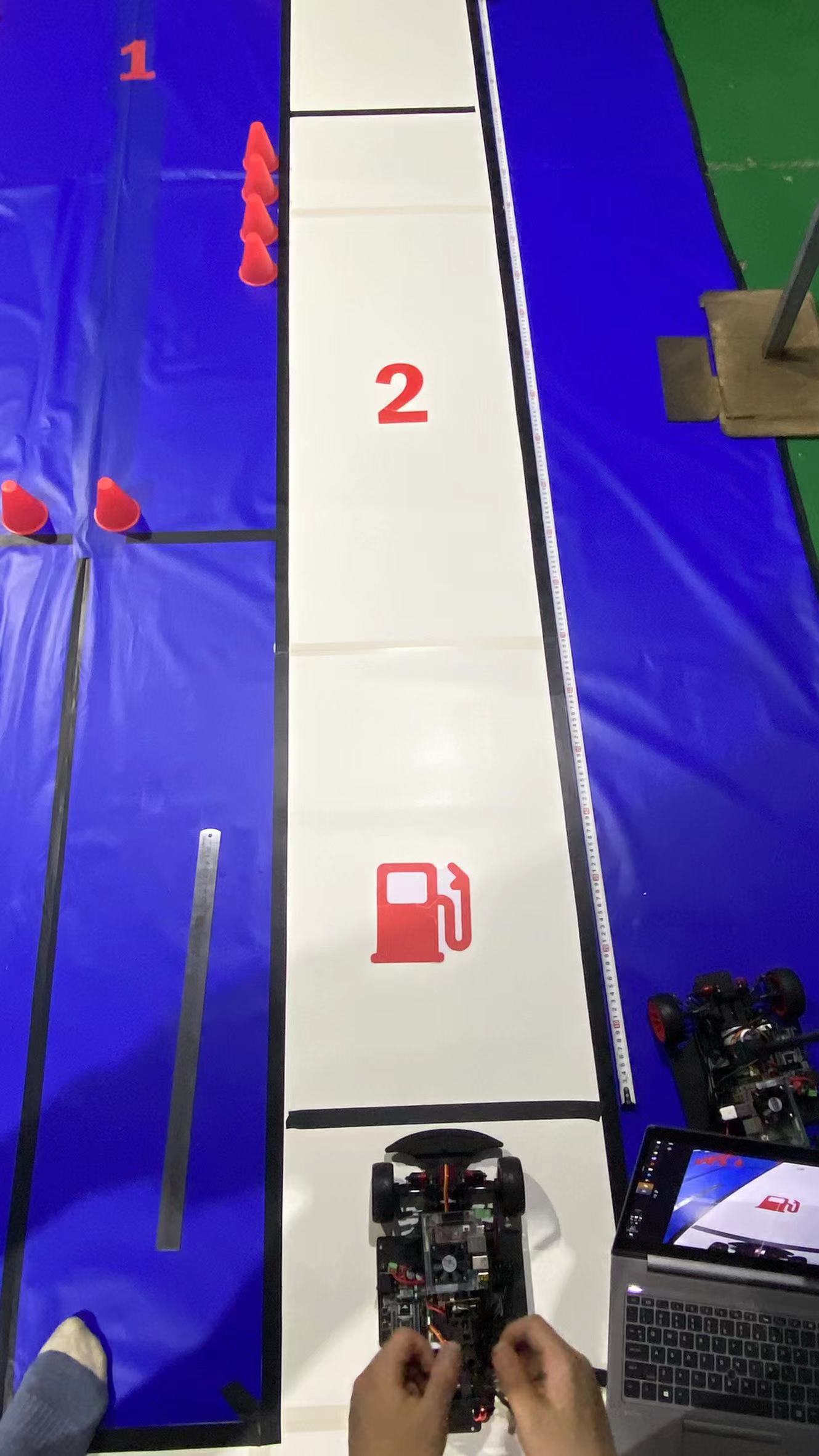
赛道奔跑(竞赛模式)
脱机运行:小车在赛道上奔跑时可通过 "nohup" 命令启动程序,此时拔掉网线继续运行。

若程序无法自行退出,待重新插上网线后,通过Ctrl+C终止进程,或者查询当前进程ID(ps -ef|grep ./icar),并杀死当前进程(kill -9 ID)。







Image输出 → 预处理 → 赛道识别(Track) → 特殊元素识别(Rec/Det) → 路径拟合 → 运动控制 → 下位机




-
摄像头前瞻距离:1.6~2.5米

-
下位机设计PID模型/电机模型-控速,控制单位:m/s (float)
-
下位机舵机控制,TIM/定时器计数上限20000,频率50Hz,占空比控制阈值[500,2500]。上位机理论控制阈值[1100, 1500, 1900] / 左|中|右,舵机中值及左右阈值在实际的标定值上偏移。

