This project is from the course EN530.678.S2018 Nonlinear Control and Planning in Robotics, The Johns Hopkins University.
For more information, please visit the course website
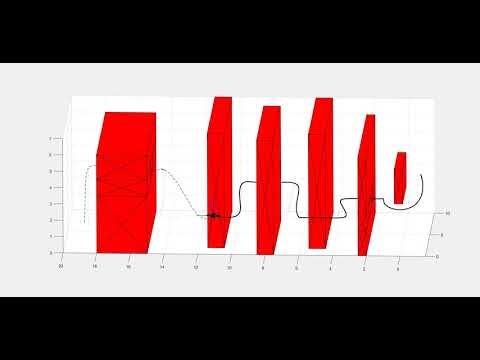
Low time penalty
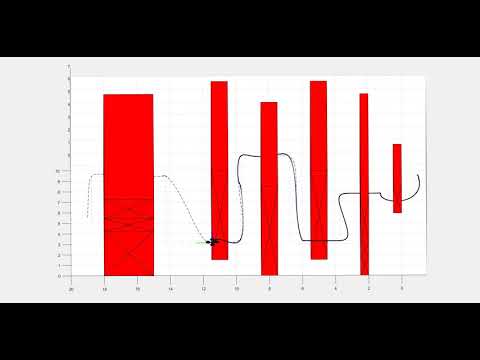
High time penalty
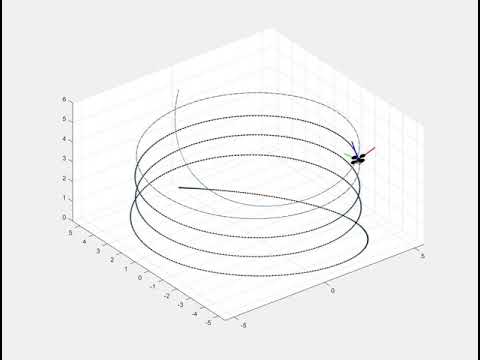
No disturbances
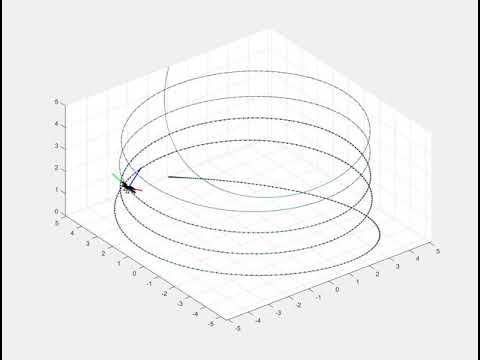
With disturbances
Minimum snap trajectory generation and control for quadrotors: https://ieeexplore.ieee.org/abstract/document/5980409
Polynomial Trajectory Planning for Aggressive Quadrotor Flight in Dense Indoor Environments: https://link.springer.com/chapter/10.1007/978-3-319-28872-7_37
Geometric tracking control of a quadrotor UAV on SE(3): https://ieeexplore.ieee.org/abstract/document/5717652
Control of Complex Maneuvers for a Quadrotor UAV using Geometric Methods on SE(3): https://arxiv.org/abs/1003.2005