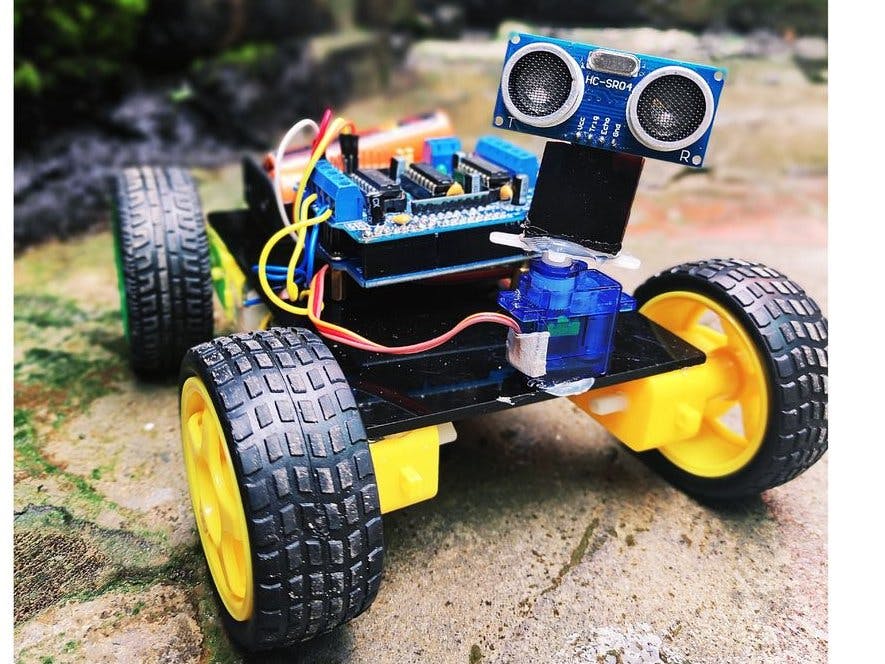
- This smart car has various features like:
- following a straight line path,
- following a curved line path,
- turning left or right as per the convenience for avoiding obstacles.
- It takes input from an IR proximity or ultrasonic sensor to detect any obstacle.
- Its speed can be controlled easily by a function.
- It also has a Fail-safe kill switch which can be used in case of any malfunctioning of motor driver.
-
This switch will turn off the power supply to motor driver which results in stopping the car instantly.
-
On an advanced level: You can add an IMU (MPU-6050/MPU-9050) data, to get the orientation of the bot.
This project contains the sample code for arduino and image output of them used for simulation in proteus software.
Simply implement your algorithm and test it out in proteus or real hardware. Share the .ino and image files of the same for each issue that you solve.
Support open source software by participating in Hacktoberfest and get involved in open source.
Please check all issues labelled as hacktoberfest to start contributing!
Kindly consider leaving a ⭐ if you like the repository and our organization.
-
Even this pandemic can’t stop us from making hardware projects, thanks to the simulators.
-
We recommend using microcontroller based boards like Arduino,etc.
- To get started with Arduino and it’s IDE follow this playlist
-
We recommend using Proteus to simulate the project and test it in case you don’t have access to the hardware components.
-
Follow this video to get started with how to use Proteus
-
Fork the repo
-
Clone your forked repo and move inside it:
git clone https://github.com/IEEE-VIT/Obstacle-Avoider.git
cd Obstacle-Avoider- Checkout to a new branch to work on an issue:
git checkout -b my-amazing-feature- Now you can open the project and write your code
- Once you're all done coding, it's time to open a PR :) Run the following commands from the root of the project directory:
git add .
git commit -m "A short description about the feature"
git push origin <my-amazing-feature>Open your forked repo in your browser and then raise a PR to the master branch of this repository!
To start contributing, check out CONTRIBUTING.md. New contributors are always welcome to support this project. If you want something gentle to start with, check out issues labelled as easy or good-first-issue. Check out issues labelled as hacktoberfest if you are up for some grabs! :)
This project is licensed under MIT.