
本开源项目主要分享的是一款有STM32F103C8T6控制芯片控制的平衡小车,平衡算法主要使用一阶线性倒立摆模型,在Matlab利用LQR算法计算出反馈矩阵,通过MPU6050以及电机编码器反馈实现平衡以及转向的控制。本项目主要是记录我绘制的第一块pcb以及第一次使用Markdown。
- 建模:主要是solidworks文件,比较简单,主是为了固定电路板和电机
- 平衡车驱动板:AD文件,个人绘画的第一块板子
- matlab_source: Matlab计算文件
- MyPHC_F103C8T6: 代码
-
主控板
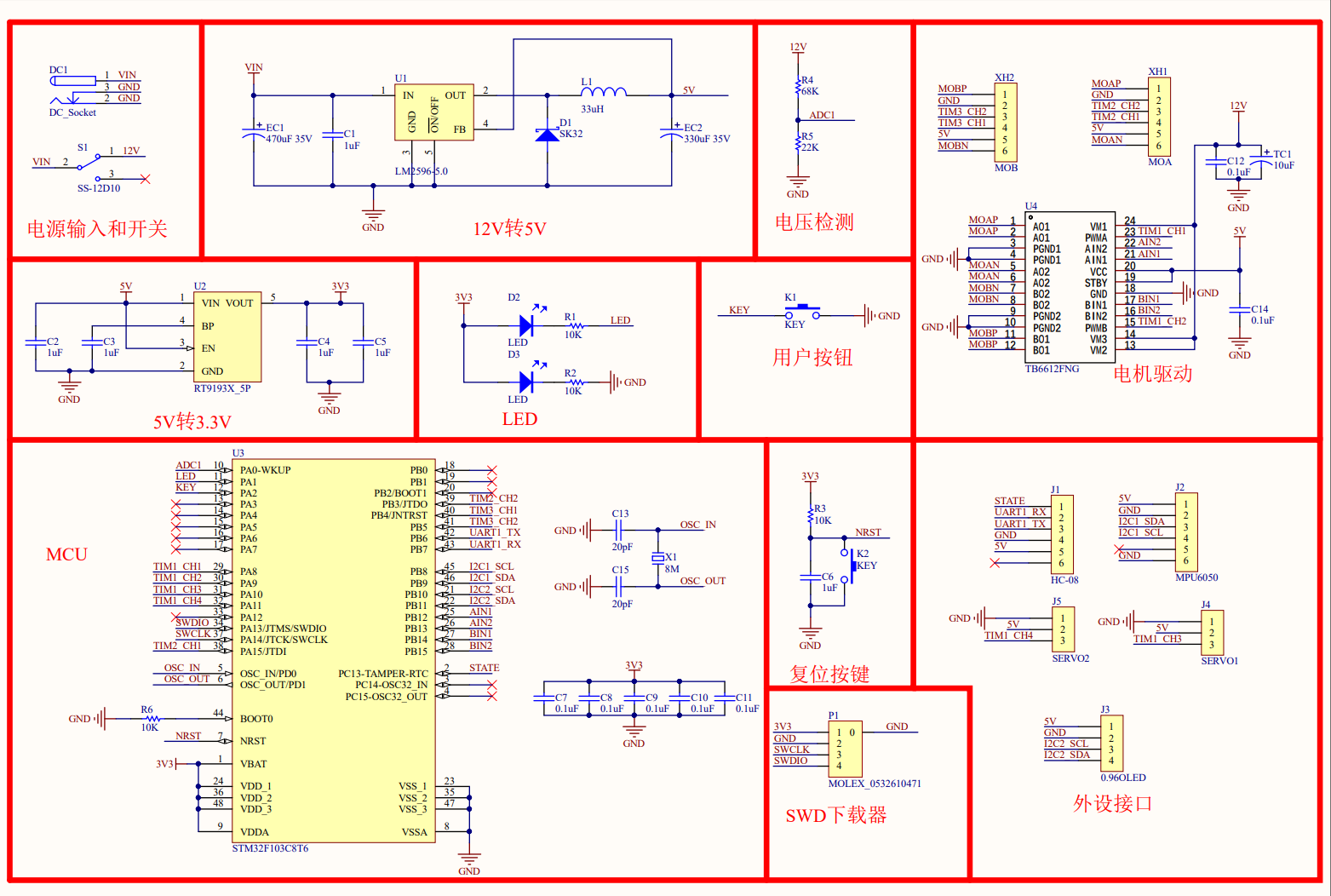
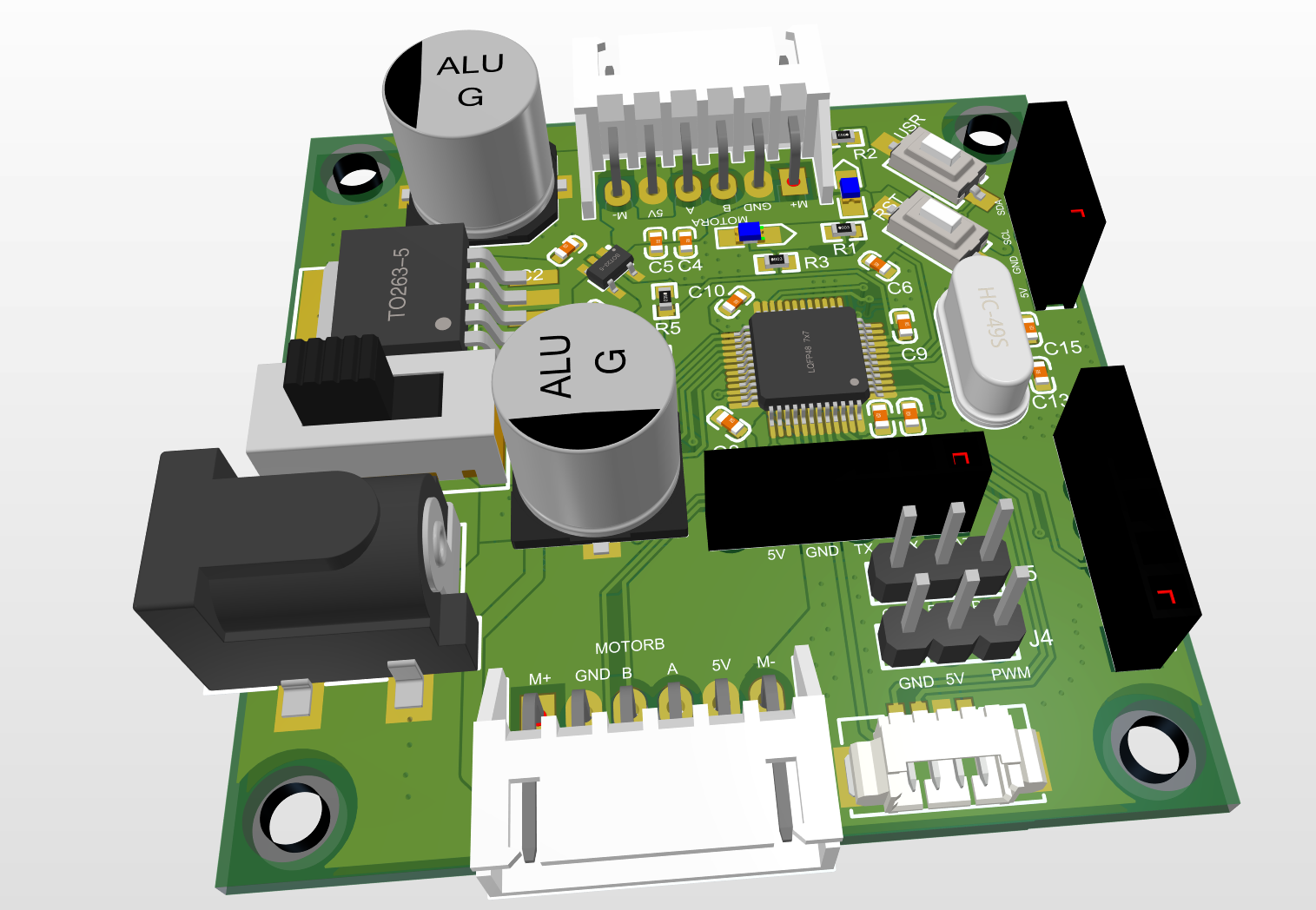 主控板主要是集成电压转换模块,电机驱动模块,主控芯片以及一些外设接口,内容比较简单。但由于是本人第一次绘制PCB,经历了电路设计,电路绘制,元件采购再到最后的焊接,学到非常多的东西,所以这一块板子是非常具有纪念价值。板子中的所有功能都可正常使用,唯一不足是蓝牙接口的TX和RX没有与购买的蓝牙设备相对应,所以只能用杜邦线将RX和TX对接一下。
主控板主要是集成电压转换模块,电机驱动模块,主控芯片以及一些外设接口,内容比较简单。但由于是本人第一次绘制PCB,经历了电路设计,电路绘制,元件采购再到最后的焊接,学到非常多的东西,所以这一块板子是非常具有纪念价值。板子中的所有功能都可正常使用,唯一不足是蓝牙接口的TX和RX没有与购买的蓝牙设备相对应,所以只能用杜邦线将RX和TX对接一下。 -
电机
 电机我使用的是光电编码器的直流减速电机MG513P3012V,使用这款电机主要是大一立项剩下的,拿出来使用总好过放盒子积灰。但我不推荐使用这种电机作为平衡车的驱动轮,最主要的原因是电机的虚位很大,所以很难在平衡位置实现平衡,只会在在附近来回摆动。
电机我使用的是光电编码器的直流减速电机MG513P3012V,使用这款电机主要是大一立项剩下的,拿出来使用总好过放盒子积灰。但我不推荐使用这种电机作为平衡车的驱动轮,最主要的原因是电机的虚位很大,所以很难在平衡位置实现平衡,只会在在附近来回摆动。 -
外设 蓝牙:HC-08
陀螺仪: MPU6050(正点原子)
电池: 12V2800mAh锂电池(容量无所谓,跟你设计的小车大小有关)
屏幕: 0.96寸OLED



- 物理建模

---经过计算化简以及线性化处理之后就可以得到状态空间方程

调整Q和R矩阵,经过matlab的lqr()函数计算,最终得到状态反馈矩阵
- 蓝牙控制
小车控制主要是使用手机蓝牙通信 在这里我使用的是蓝牙调试器,自己设计控制组件

 能够固定板子和电机就行,本身结构就非常简单
能够固定板子和电机就行,本身结构就非常简单
由于LQR的强鲁棒性,小车不需要过多调整参数便可实现很好的控制。
小车在静止平衡状态下由于电机虚位,会小幅度摆动,在运动状态下能够很好地根据命令运行。