
Prometheus,在希腊神话中,是最具智慧的神明之一,希望本项目能为无人机研发工作带来无限的智慧与光明。
Prometheus是一套开源的自主无人机软件平台,为无人机的智能与自主飞行提供全套解决方案。本项目基于PX4开源飞控固件,旨在为PX4开发者配套成熟可用的机载电脑端程序,提供更加简洁快速的开发体验。目前已集成建图、定位、规划、控制及目标检测等模块,并配套有Gazebo仿真测试代码。
-
安装及使用: Prometheus WIKI
-
配套课程: Prometheus自主无人机二次开发课程,本课程偏重本项目中的基础知识和操作实践,适合本项目入门者,购买课程后会定期安排线上答疑活动(语音交流、方便透彻!) 课程报名
-
配套硬件: Prometheus 450第三代正式发布! 更多配套产品请关注 阿木实验室淘宝店 或 阿木实验室京东旗舰店
-
配套地面站: 即将推出,敬请期待!
-
开发及维护团队: 开发成员介绍
-
开源项目,维护不易,还烦请点一个star收藏,谢谢支持!
-
关于项目有任何问题,请在本项目issue提问,或者添加微信jiayue199506(备注消息:Prometheus)进入Prometheus自主无人机交流群
-
想了解更多资讯信息或者寻求项目合作、无人机软硬件定制服务,请扫描右方二维码并关注微信公众号 阿木实验室

只要使用Prometheus项目进行自主无人机开发,并发表论文,即可获得阿木奖学金,详情请戳这里 !
-
RGBD相机建图
-
3D激光雷达建图(暂无演示图片)
-
局部规划(APF)
-
全局规划(A star)
-
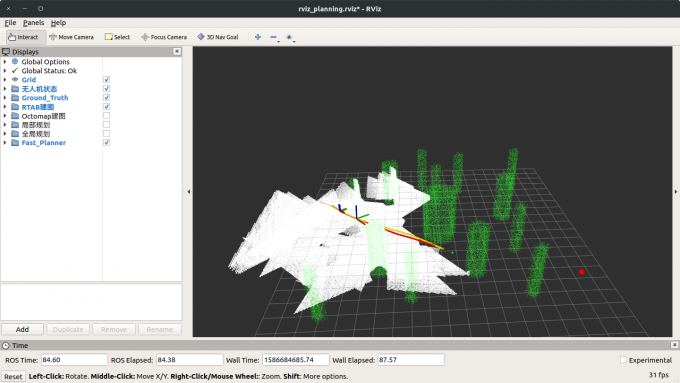
轨迹优化(Fast_Planner)
-
外环控制器二次开发
-
多机编队飞行(集中式或分布式控制)
-
圆形穿越
-
颜色巡线
-
数字识别
-
KCF框选追踪
-
YOLO通用目标检测(暂缺演示图)
-
移动平台自主降落
-
无人机+无人车协同控制





- 本项目受 BSD 3-Clause 协议保护。点击 LICENSE了解更多
- 本项目仅限个人使用,请勿用于商业用途。
- 如利用本项目进行营利活动,阿木实验室将追究侵权行为。