Robot system model description extended with network architecture
This repository hosts the robot description files for the following components:
- Universal Robots UR3e
- Intel RealSense D455
- OnRobot RG2-FT
- Intel NUC
- MikroTik hAP AC2
- TP-Link TL-SG1005P PoE switch
- SimCom sim8202g 5G modem
- Raspberry Pi 4B
The listed model files have been extended with network topology information.
- Intel RealSense SDK >= 2.54
sudo apt-get install ros-humble-librealsense2 ros-humble-diagnostic-updater ros-humble-xacro ros-humble-joint-state-publisher-gui ros-humble-joint-state-broadcaster
- Since these packages are wrapped to work in ROS2 environment, a ROS2 workspace needs to be created preferably in the following way:
mkdir -p ~/component_descr_ws && cd ~/component_descr_ws- Clone the repository with all the submodules into an src folder:
git clone --recurse-submodules https://github.com/EricssonResearch/urdf-yang.git src- Build the packages in the workspace:
colcon build
- Enter workspace:
- cd
~/component_descr_ws - Build containing packages:
colcon build- Source workspace:
source ./install/setup.bash
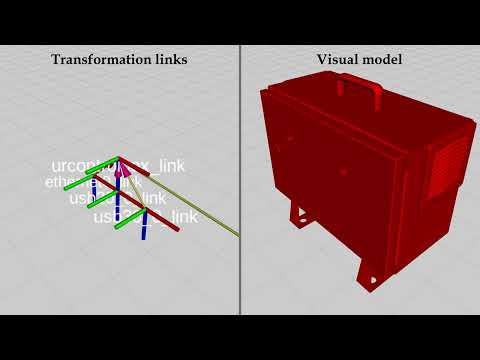
ros2 launch system_description system_launcher.launch
Desired output:

ros2 param get /robot_state_publisher robot_description > robot_system_model.urdf