
-
下載檔案 進入到機器人工作目錄的 /src 目錄中,並執行以下指令來下載插件
git clone https://github.com/EnderDragonEP/multi_foals_navi_plugin-fork.git註:要求提前建好地圖
-
編譯 在工作區目錄下,執行以下指令來進行編譯
catkin build -
安裝依賴元件 在工作區目錄下,執行以下指令來進行編譯
rosdep install -q -y -r --from-paths src --ignore-src -
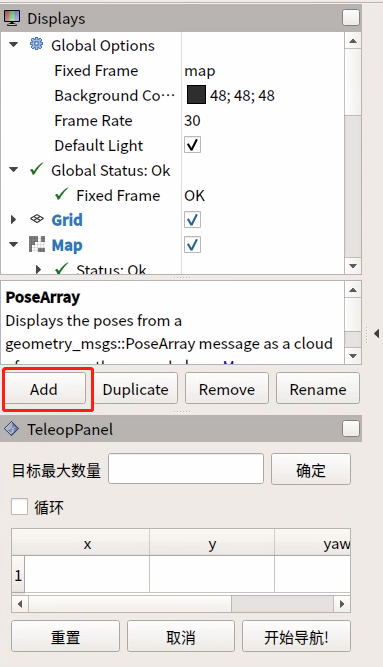
載入外掛
RViz 的左上角依次點選 Panels → Add New Panel → navi_multi_goals_pub_rviz_plugin → MultiNaviGoalsPanel


插件視窗:

-
修改組態
-
新增 marker (目標點標記)
RViz 左側 Display → add → Marker

-






- 修改 2D Nav Goal 按鈕話題
-
RViz 的左上角 Panels → Add New Panel → Tool Property


-
將 2D Nav Goal → Topic 修改為 /move_base_simple/goal_temp

-



做完以上操作後 Ctrl + S 保存 RViz 組態,如忘記保存,則下次進來要重複操作。
-
可設定目標點的最大數量:要求所設定目標點個數不能大於該參數(可以小於)
-
是否循環:若勾選,導航至最後一個目標點後,將重新導航至第一個目標點。
- 例:1 → 2 → 3 → 1 → 2 → 3 → ···,該選項必須在開始導航前勾選
-
任務目標點列表: x/y/yaw,地圖上給定目標點的位姿(xy坐標與航向角yaw)。
- 設定完目標最大數量,保存後,該列表會生成對應數量的條目
- 每給出一個目標點,此處會讀取到目標點的坐標與朝向
-
重設:將清空當前所有目標點
-
取消:取消當前目標點導航任務,機器人停止**。再次點選開始導航後,會從下一個任務點開始。
- 例:1 → 2 → 3,在 1 → 2 的過程中點選取消,機器人停止**,點選開始導航後,機器人將從當前坐標點去往3。
-
開始導航:開始任務
-
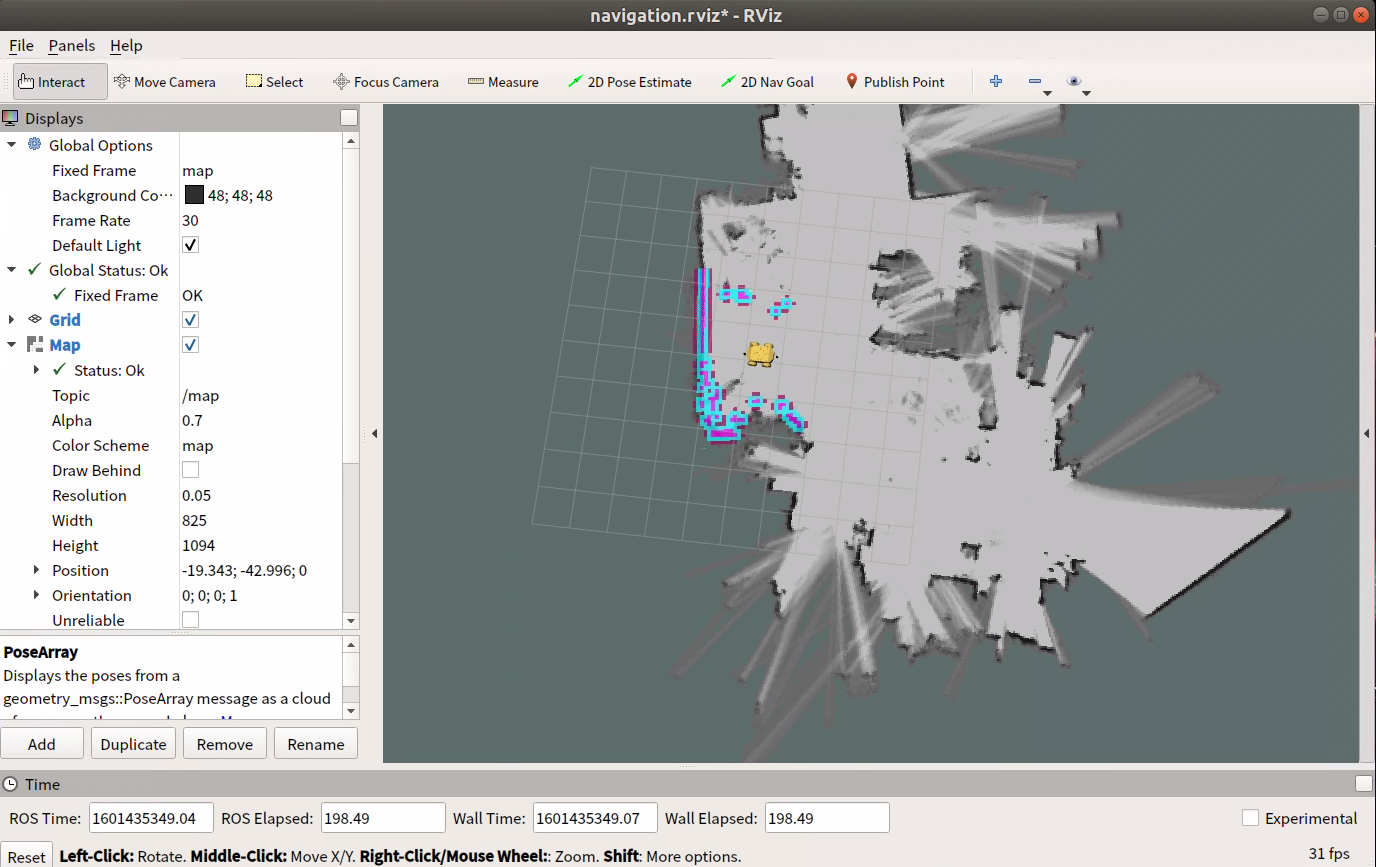
初始化機器人位置
- 點選開始導航,打開 Rviz,使用鍵盤控制機器人**,當環境特徵與地圖匹配完成後,機器人會定位到地圖中對應的位置。
-
設定任務
-
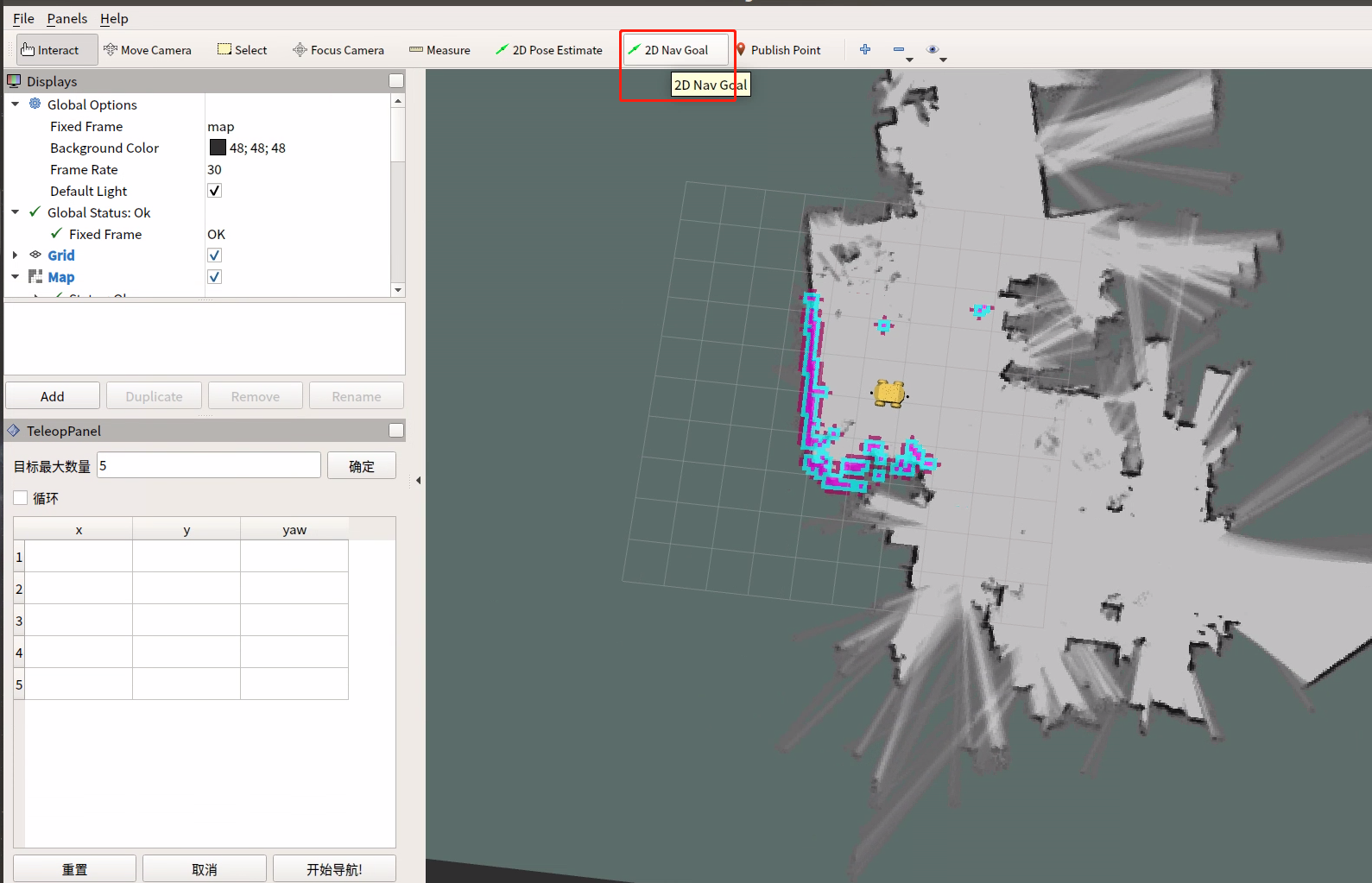
設定任務目標點個數,點選確認保存

-
設定目標點 點選ToolBar上的2D Nav Goal,在地圖上給定目標點。(每次設定都需要先點選2D Nav Goal) 目標點有朝向區分,箭頭頂端為車頭方向。
-
-
點選開始導航,導航開始

已完成任務會變為紅色(如下圖)
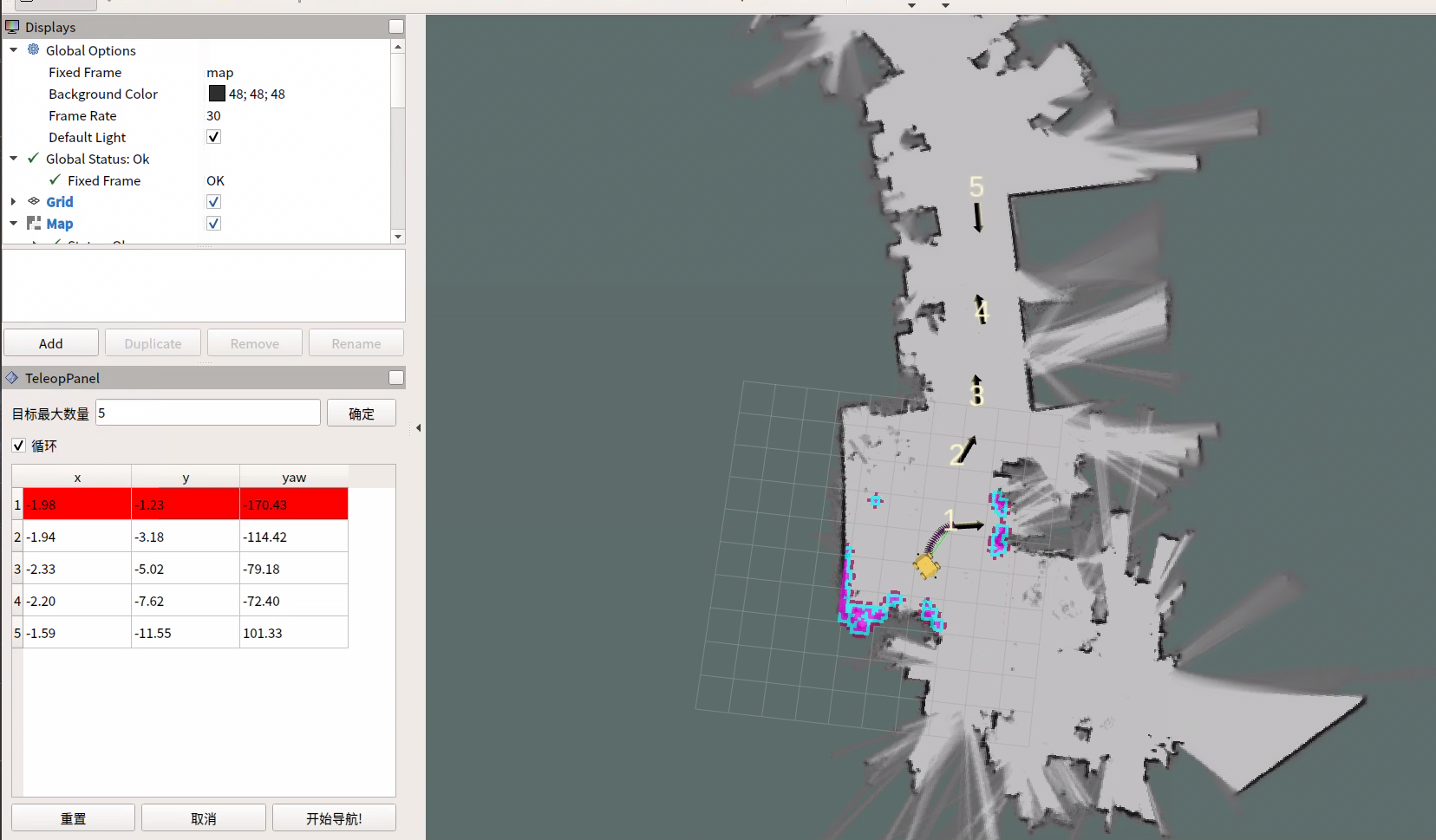
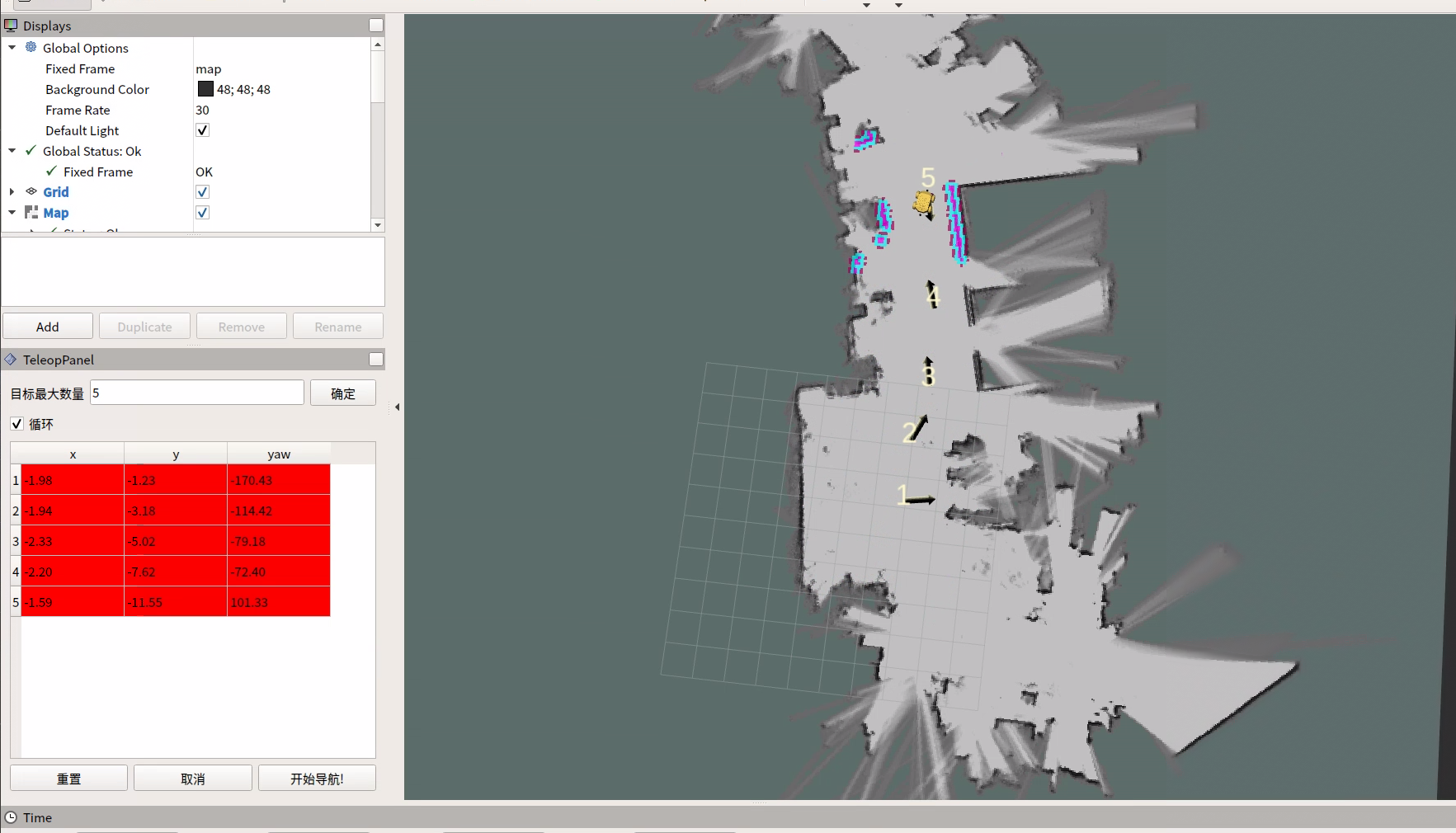
未勾選循環,單次任務完成後停止。 勾選循環,單次任務完成後,會從最後一個目標點到第一個目標點,顯示顏色為藍色。






