- https://github.com/pjreddie/darknet
- https://github.com/AlexeyAB/darknet
非常推荐AlexeyAB的darknet改进版
论文: - yolov3
- https://pjreddie.com/media/files/papers/YOLOv3.pdf
- yolov4
- https://arxiv.org/abs/2004.10934
- yolov5
- https://github.com/ultralytics/yolov5
目标检测发展进程:

YOLOv3复现代码合集涵盖 5 种常用深度学习框架:
| Project | Infernece | Train | star |
|---|---|---|---|
| tensorflow-yolov3 | √ | √ | 1837 |
| yolov3-tf2 | √ | √ | 795 |
| tensorflow-yolo-v3 | √ | x | 666 |
| YOLOv3-tensorflow | √ | √ | 272 |
| Project | Infernece | Train | star |
|---|---|---|---|
| PyTorch-YOLOv3 | √ | √ | 2955 |
| yolov3 | √ | √ | 2686 |
| pytorch-yolo-v3 | √ | x | 2291 |
| YOLO_v3_tutorial_from_scratch | √ | x | 1489 |
| ObjectDetection-OneStageDet | √ | √ | 1471 |
| YOLOv3_PyTorch | √ | √ | 442 |
| PyTorch_YOLOv3 | √ | √ | 258 |
| Project | Infernece | Train | Star |
|---|---|---|---|
| keras-yolo3 | √ | √ | 4680 |
| YOLOv3 | √ | x | 505 |
| keras-YOLOv3-mobilenet | √ | √ | 410 |
| Project | Infernece | Train | Star |
|---|---|---|---|
| MobileNet-YOLO | √ | √ | 569 |
| caffe-yolov3 | √ | x | 273 |
| Caffe-YOLOv3-Windows | √ | √ | 163 |
| Project | Infernece | Train | Star |
|---|---|---|---|
| gluoncv | √ | √ | 3187 |
- https://zhuanlan.zhihu.com/p/50170492
- https://github.com/amusi/YOLO-Reproduce-Summary/blob/master/README.md



《Tutorial : Building a custom OCR using YOLO and Tesseract》
Traffic Signal Violation Detection System using Computer Vision - A Computer Vision based Traffic Signal Violation Detection System from video footage using YOLOv3 & Tkinter. (GUI Included)


加入关键点的darknet训练框架,使用yolov3实现了轻量级的人脸检测



| Network | VOC mAP(0.5) | COCO mAP(0.5) | Resolution | Run Time(Ncnn 1xCore) | Run Time(Ncnn 4xCore) | FLOPS | Weight size |
|---|---|---|---|---|---|---|---|
| MobileNetV2-YOLOv3-Nano | 65.27 | 30.13 | 320 | 11.36ms | 5.48ms | 0.55BFlops | 3.0MB |
| Yolo-Fastest(our) | 61.02 | 23.65 | 320 | 6.74ms | 4.42ms | 0.23BFlops | 1.3MB |
| Yolo-Fastest-XL(our) | 69.43 | 32.45 | 320 | 15.15ms | 7.09ms | 0.70BFlops | 3.5MB |
- https://zhuanlan.zhihu.com/p/234506503
- https://github.com/dog-qiuqiu/Yolo-Fastest
- https://github.com/dog-qiuqiu/MobileNet-Yolo
- https://www.pyimagesearch.com/2020/02/03/how-to-use-opencvs-dnn-module-with-nvidia-gpus-cuda-and-cudnn/
- https://www.pyimagesearch.com/2020/02/10/opencv-dnn-with-nvidia-gpus-1549-faster-yolo-ssd-and-mask-r-cnn/
在yolov5的基础上增加landmark预测分支,loss使用wingloss,使用yolov5s取得了相对于retinaface-r50更好的性能

- https://github.com/jizhishutong/YOLOU

- https://github.com/dog-qiuqiu/FastestDet
- https://github.com/RangiLyu/nanodet
- https://github.com/iscyy/yoloair
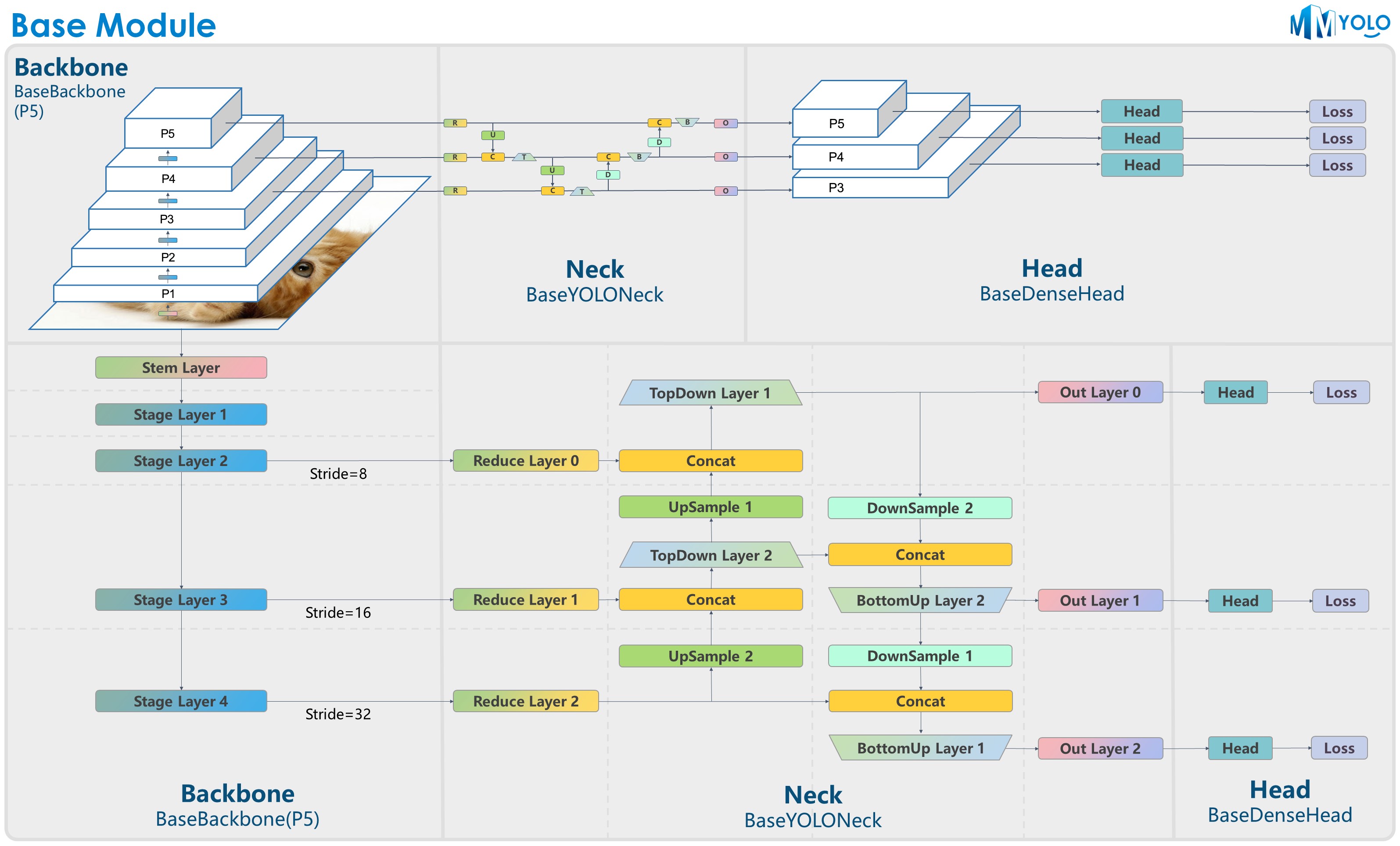
- https://github.com/open-mmlab/mmyolo
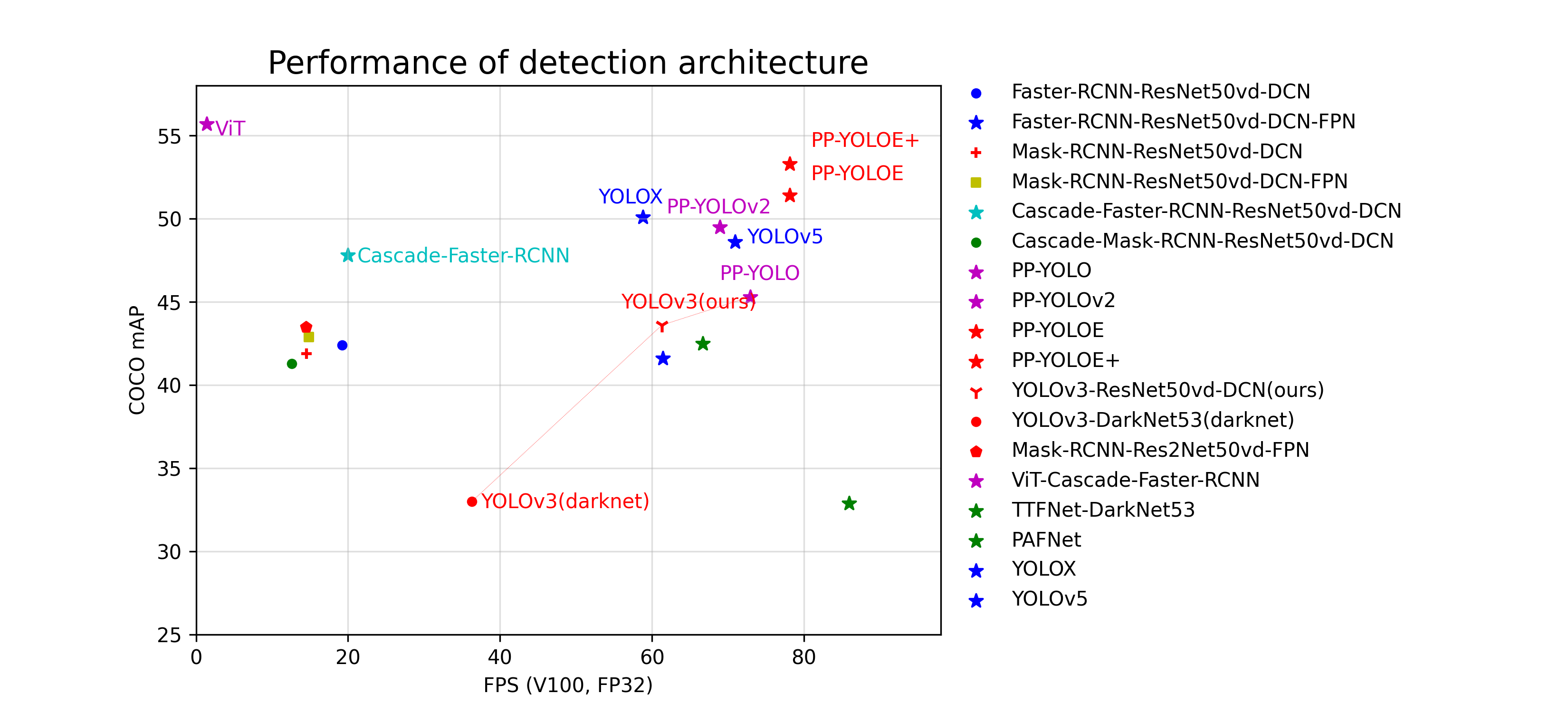
- https://github.com/PaddlePaddle/PaddleYOLO

- https://github.com/iloveai8086/YOLOC






- https://github.com/zbyuan/pruning_yolov3
- https://github.com/coldlarry/YOLOv3-complete-pruning
- https://github.com/Lam1360/YOLOv3-model-pruning
- https://github.com/tanluren/yolov3-channel-and-layer-pruning
- https://github.com/zbyuan/pruning_yolov3
- https://github.com/SpursLipu/YOLOv3-ModelCompression-MultidatasetTraining-Multibackbone
| Model | Size | mAP@0.5 | BFLOPs |
|---|---|---|---|
| EfficientNet_b0-PRN | 416x416 | 45.5 | 3.730 |
| EfficientNet_b0-PRN | 320x320 | 41.0 | 2.208 |
5.2 Gaussian YOLOv3: An Accurate and Fast Object Detector Using Localization Uncertainty for Autonomous Driving

5.3 YOLO Nano: a Highly Compact You Only Look Once Convolutional Neural Network for Object Detection
| Model | model Size | mAP(voc 2007) | computational cost(ops) |
|---|---|---|---|
| Tiny YOLOv2[13] | 60.5MB | 57.1% | 6.97B |
| Tiny YOLOv3[14] | 33.4MB | 58.4% | 5.52B |
| YOLO Nano | 4.0MB | 69.1% | 4.57B |
| DataSet | mAP | FPS |
|---|---|---|
| PASCAL VOC | 33.57 | 21 |
| COCO | 12.26 | 21 |
- https://arxiv.org/abs/1811.05588v1
- https://github.com/reu2018dl/yolo-lite
- https://mp.weixin.qq.com/s/xNaXPwI1mQsJ2Y7TT07u3g

- https://arxiv.org/ftp/arxiv/papers/1907/1907.11093.pdf
- https://github.com/PengyiZhang/SlimYOLOv3
- https://mp.weixin.qq.com/s/fDOskKqG-fsJmhT0-tdtTg
| Model | Backbone | MAP | Flops(G) | Params(M) |
|---|---|---|---|---|
| strongerv3 | Mobilev2 | 79.6 | 4.33 | 6.775 |
| strongerv3-sparsed | Mobilev2 | 77.4 | 4.33 | 6.775 |
| strongerv3-Pruned(30% pruned) | Mobilev2 | 77.1 | 3.14 | 3.36 |
| strongerv2 | Darknet53 | 80.2 | 49.8 | 61.6 |
| strongerv2-sparsed | Darknet53 | 78.1 | 49.8 | 61.6 |
| strongerv2-Pruned(20% pruned) | Darknet53 | 76.8 | 49.8 | 45.2 |
YOLOv3+ASFF(自适应空间特征融合)组合,性能优于CornerNet和CenterNet等,在COCO上,38.1mAP/60 FPS,43.9mAP/29FPS!

| System | test-dev mAP | Time (V100) | Time (2080ti) |
|---|---|---|---|
| YOLOv3 608 | 33.0 | 20ms | 24ms |
| YOLOv3 608+ BoFs | 37.0 | 20ms | 24ms |
| YOLOv3 608(ours baseline) | 38.8 | 20ms | 24ms |
| YOLOv3 608+ ASFF | 40.6 | 22ms | 28ms |
| YOLOv3 608+ ASFF* | 42.4 | 22ms | 29ms |
| YOLOv3 800+ ASFF* | 43.9 | 34ms | 40ms |
- https://arxiv.org/pdf/1911.09516.pdf
- https://github.com/ruinmessi/ASFF
- https://zhuanlan.zhihu.com/p/110205719

- https://arxiv.org/pdf/1911.08287.pdf
- https://github.com/Zzh-tju/DIoU-darknet
- https://mp.weixin.qq.com/s/St5WevfcVt4RubJsY-ZEHw

- https://github.com/WongKinYiu/PartialResidualNetworks/blob/master/pdf/iccvw-prn.pdf
- https://github.com/WongKinYiu/PartialResidualNetworks


- https://arxiv.org/abs/2007.12099
- https://github.com/PaddlePaddle/PaddleDetection
- https://zhuanlan.zhihu.com/p/163580627







