Robot Uprising Helsinki 2018 team repository
- Heidi Villikka
- Risto Lahtela
- Anu Riihiaho
- Tiina Virtanen
- Petteri Mäntymaa
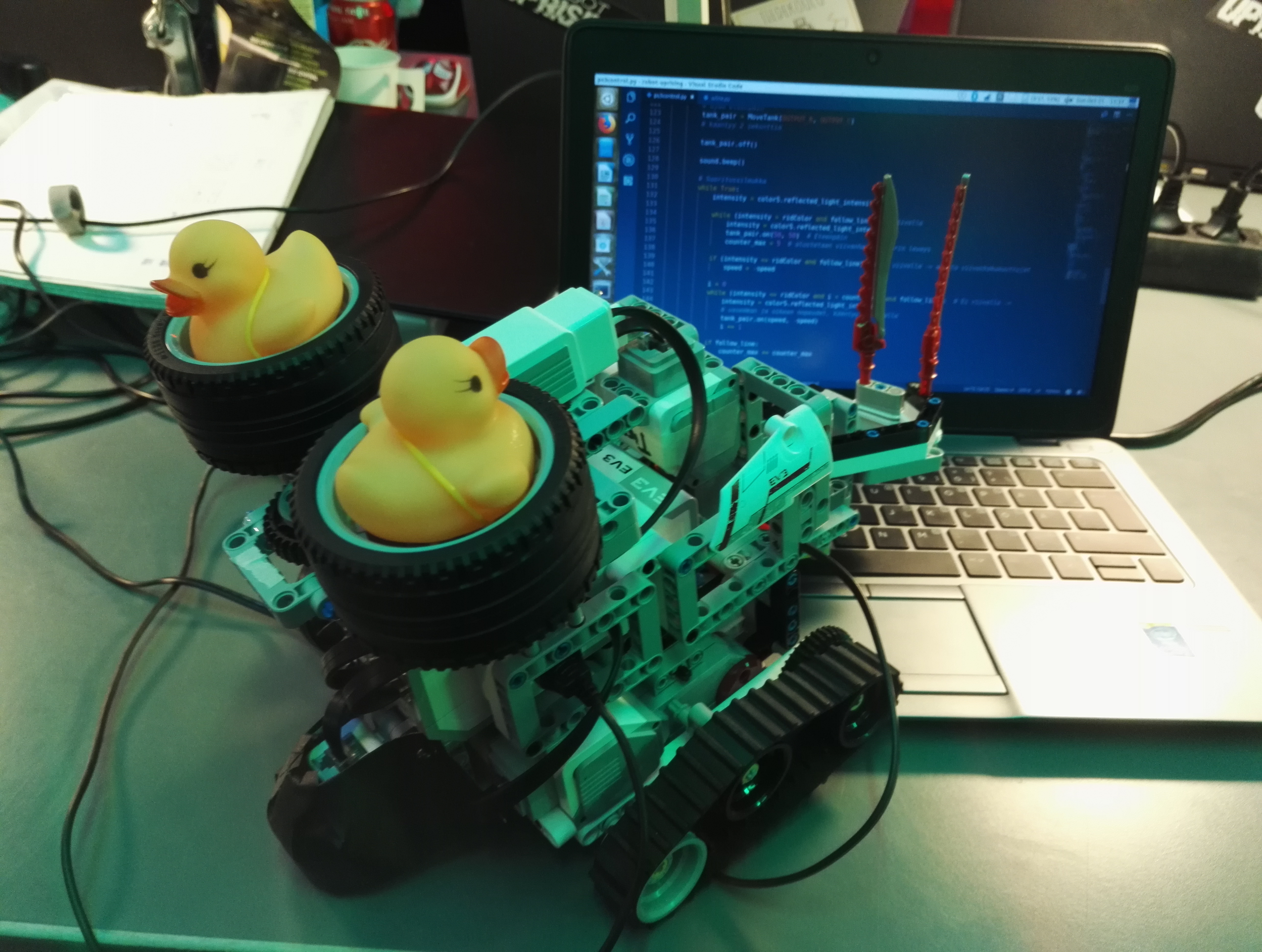
EV3dev environment implemented in Python. We used stock LEGO parts with an additional PS3 controller for Bluetooth remote control.
We have produced fully automatic designs for completing the challenges, for instance LINE FOLLOWER (and DIJKSTRA SHORTEST PATH). We have a remote control (aka. HUMAN/DUCK INTERFACE) kill switch to take control when necessary. And we have THE CLAW implementing superior praying mantis kung fu intimidation tactics. (Now w/ twin diversion DUCKs)
HUMAN/DUCK INTERFACE to yellow press-plate and switch to LINE FOLLOWER.
HUMAN/DUCK INTERFACE
HUMAN/DUCK INTERFACE operating THE CLAW
HUMAN/DUCK INTERFACE
HUMAN/DUCK INTERFACE, LINE FOLLOWER and THE CLAW for operating buttons.
SUPER BOSS FIGHT MODE! Special moves including THE CLAW, SUPER TORQUE and TWIN SPINNING DIVERSION DUCKs.
SECRET PRIME DIRECTIVE 4: TOTAL ANNIHILATION