
- Introduction
- Test setup
- Directory layout, sensors, data formats
- Coordinate systems and calibration
- KPIs
- Evaluation
- Download, License, Citation
- Questions, feedback, benchmark results
- Sample Videos
Deep learning algorithms are becoming the state-of-the-art technology used in the perception functions of AD and ADAS. With the safety assurance of level 5 AD systems the perception of the environment and especially dynamic objects becomes a central component. Data-driven AI algorithms are to a large extent determined by the training dataset. Interpretability and reliability of these algorithms are known to be challenging due to their data-driven nature.
AI based perception systems need to be tested and validated. Edge cases for testing can be derived from real world scenarios that lead to accidents caused by human drivers. Available public data is limited to normal driving situations, like KITTI http://www.cvlibs.net/datasets/kitti/ or the Waymo Open Dataset https://waymo.com/open/. Data that covers edge cases like safety critical scenarios to test these systems are still lacking.
PREPER ("PRE-crash PERception") aims at providing a dataset for evaluation and benchmarking of the safety performance of object detection in AI driven visual perception systems for road vehicles. It is comprised of tests conducted at the AstaZero test track located in Västra Götaland, Sweden during December 2020 and January 2021. The test track and driving days were funded by the OpenResearch programme by Chalmers, RISE, and SAFER and the research and data preparation work was part of the FFI project "Safety-driven data labelling platform to enable safe and responsible AI". The main data collection car (ego vehicle) was provided by the laboratory of Resource for Vehicle Research at Chalmers (REVERE).
All sequences in PREPER mimic pre-crash phases of two passenger cars, the ego car (REVERE) and the target car (AstaZero). To cover a variety of pre-crash scenarios the tests were conducted at the rural and city areas of the AstaZero track. In total there were eight different scenarios each with several variations of sequences that replicate the pre-crash phase of an accident situation. The selected scenarios are based on accident data analysis, EuroNCAP and U.S. NCAP test configurations as well as real world accident pre-crash data from the IGLAD pre-crash matrix http://www.iglad.net ensuring relevance for real life safety. Variations of the different sequences within a scenario include:
- With and without “collision” as a reference
- Fake/critical only maneuvers
- Occlusion by another car or a building
- Different degrees of “collision” overlap
- Different speeds of the target car
Additionally, there was a leading car in some sequences for occlusion purposes of the target car. In order to safely conduct the tests the speed of the vehicles was lower when driving the tests than it is in the replicated pre-crash scenarios in the PREPER data set. All sensor parameters like timestamps, camera frame rates, lidar rotation, and speeds are transformed to a unified and warped speed afterwards which reflects the real world speed of the pre-crash scenarios. The tests were driven by professional drivers from AstaZero to ensure a safe test performance. The warped speeds of the ego vehicle in rural scenarios is 80 kph and in the city 50 kph. The warped speed of the target car varies between the sequences. Ground truth for the leading car is not provided as it is not part of the benchmark.
This is an overview of the scenarios and the number of sequences in each scenario:
| Test Area | Scenario | Sequences |
|---|---|---|
| rural | straight | 29 |
| rural | curve_left | 31 |
| rural | curve_right | 30 |
| city | cross1 | 5 |
| city | cross2 | 6 |
| city | cross3 | 10 |
| city | cross4 | 8 |
| city | turn | 41 |
| total | 160 |
Each scenario is stored in a separate folder which contains a subfolder for each sequence of that scenario. Each sequence folder contains the ground truth data for the available sensors in that sequence. All sensors refer to the same time scale starting at zero in the beginning of each sequence with nanosecond precision. Each camera and lidar sensor frame is stored in a file named after the timestamp of this frame.
Vehicle position and orientation is captured by OxTS GPS/IMU units in both ego
and target car and an additional Applanix GPS/IMU in the ego car. The
calibrated and processed data from these units is stored in the file
targetpose.csv in each sequence folder and contains time, position (x, y, z
coordinates) and orientation (yaw, pitch, role) of the target vehicle.
There were two lossless Basler cameras mounted in the front of the ego vehicle,
one facing forward and one in a 45 degree angle to the right. The latter camera
data is provided only in the "cross" scenarios with the file suffix _right.
The frame rate of both cameras was 34 frames per second (warped speed). All
camera images are stored in lossless png format.
The lidar mounted on top of the ego car is a Velodyne HDL-32 rotating at 20Hz
(warped speed). The measurements are stored in binary files with the extension
.bin in each sequence folder. Each point measurement consists of four 64-bit
floating point numbers x, y, z and intensity in little-endian byte order. The
whole n x 4 point matrix is sequenced in C-order. The data can be read e.g. in
python using numpy.fromfile() on an x86_64 machine and reshaped to a n x 4
matrix.
The origin of the reference coordinate systems is near the center of gravity in the ego car with the following orientation in driving direction:
- x-axis to the right
- y-axis to the front
- z-axis up
Both the target position and the lidar data measurements are relative to the reference coordinate system.
The local coordinate system in the target car has its origin near the center of gravity of the target car and the same axis orientations as the ego car but relative to its own driving direction. The xy-plane of both cars is approx. 0.40m above the ground.
Projecting points in the reference coordinate system to the front or right
camera can be accomplished with the following transformations using the OpenCV
camera coordinate system. An example for drawing a bounding box around the
target car is provided in the script projection.py.
Translation vectors t = [x, y, z] in meter:
trans_front = [+0.20, +1.80, -1.50]
trans_right = [-0.20, +1.80, -1.75]
Rotation vectors r = [pitch, yaw, roll] in degree:
rot_front = [+4.66, -0.73, +0.00]
rot_right = [+5.90, -43.00, +0.00]
Intrinsics for both cameras are:
fxy = 1716
pcx = 1072
pcy = 699
With the intrinsic matrix:
[ fxy, 0.0, pcx]
[ 0.0, fxy, pcy]
[ 0.0, 0.0, 1.0]
Distortion is neglectable for this purpose (zero-matrix 5 x 5).
For our benchmarking purpose we propose the notion of a collision warning KPI as a measure that detects and assesses an upcoming collision threat. Formally, we describe it as a function that maps a (small) set of ground truth parameters to a (small) set of values that represent the presence and threat-level of an expected collision at a given point in time. Obviously, the detection of an upcoming collision needs to be as early and reliably as possible. While early detections can help to completely avoid critical situations, late detections enable executing counter-measures that can mitigate the collision outcome but also can be quite drastic (emergency brake or steering maneuver) and thus have to be reliable.
There is no general collision warning function that covers all possible
scenarios and constellations of an ego and target vehicle. A collision
assessment criterion can also be subjective and differ between drivers or take
aspects into account that are not easy to model, such as “how good is the
target car able to keep its lane”. Often, the driver’s experience also takes
predicted behavior of the driver of the target car into account based on the
context of the current situation, possibly involving other traffic
participants. For our purpose of benchmarking machine learning perception
systems with the given test scenarios we have defined a set of KPIs which are
explained in more detail in the following subsections. Python code for
calculating these KPIs from the test data is provided in a separate file
kpis.py. In practice, when implementing a collision warning system in a car
it is advisable to calculate several different warnings at once and decide upon
a final collision assessment based on the current driving situation.
The lateral distance to the target car is defined as the x-component of the position of the target car in the ego car's (reference) coordinate system. When it drops below a predefined threshold, the collision warning is activated. As this warning can be calculated from the position of the target car at each single point in time it is a static collision warning and doesn't require object tracking. This type of collision warning is used only for the "turn" scenarios where the target car has a higher lateral movement component than in the other scenarios. This is due to the driver needing to avoid a real collision in the test setup.
The delta bearing is defined as the change of the bearing to the target vehicle within a predefined time interval. As we need a sliding window for tracking the bearing to the target car it is a dynamic collision warning. As a consequence, the AI perception system needs to provide an object tracking mechanism to be able to calculate this warning. This warning is used for all but the "turn" scenarios. It should be noted that this collision warning is also triggered in the reference sequences of the "curve_left" scenarios because an oncoming vehicle in a left curve is on collision course at some point. However, this is not a big limitation as the warning level (see next section) is still low in these cases.
In addition to identifying a collision threat the risk level of the
threat needs to be assessed to be able to respond with appropriate
measures. This works in the same way for warnings based on both "lateral
distance" and "delta bearing" and only depends on the distance of
the target vehicle to the ego vehicle. Predefined distance ranges are
mapped to eight warning levels from 0 (no warning) to 7 (maximum warning
level). For implementation details please have a look at the function
warning_level() in kpis.py.
The object perception task of an in-vehicle AI perception system can generally be described as detecting objects and their position and orientation (pose) based on sensor data in real time. Usually, a 3D bounding box is drawn around the detected objects to visualize the result. The PREPER dataset provides the pose of the target vehicle as ground truth data and the collision warning KPIs to identify a safety relevant warning situation. In order to assess the AI perception system task in the context of the safety relevant PREPER sequences the KPIs can be applied to the pose output of the AI system based on the PREPER camera data and compared to the KPI values calculated from the PREPER ground truth data. This way, the object detection performance of the AI system is evaluated in the context of the collision warning task to see if the warnings generated by the AI system are early and reliable enough compared to the same warnings generated based on ground truth.
It is not intended to train an AI system on the PREPER data to predict the KPIs directly. Collision situations are very diverse and infrequent so they are not well suited for generalization. However, the pre-crash sequences in PREPER are still sufficient to test the precision of an object detection system within safety relevant constraints.
The lidar data supplied with PREPER can serve as an additional source of information, especially for measuring the accurate distance to the target in close vicinity of the ego car. However, the range of the lidar is limited.
Some AI perception systems might not provide the full target pose but generate 2D bounding boxes around the objects in the camera image along with a distance to the object. Then it still might be possible to calculate the KPIs if the necessary input parameters for the collision warning functions are supplied. These are: distance, bearing, lateral distance to the object and projected object width.
By the time the PREPER data is released a formal procedure to evaluate and compare different results in a benchmark has not been established, yet. However, feedback in the form of evaluation results obtained with your AI perception algorithms are more than welcome. After obtaining a number of different evaluation results, it should also be possible to provide a comparison and benchmarking procedure and then this document will be updated accordingly. When submitting your data, please provide the predicted target poses or alternatively the collision warning function input parameters (distance, bearing, lateral distance and projected object width) for each PREPER sequence. In any case, please get in touch before submitting your results.
The PREPER dataset can be downloaded from
https://drive.google.com/drive/folders/1IFxqBPkGjkMsQFRPUoub_90s3GM1dY2p?usp=sharing.
The main dataset is made available as one archive named preper.zip containing
the camera data and target poses. The optional lidar data is stored in a
separate file named preper_lidar.zip. Both can be unpacked to the same
directory to obtain the full dataset. This readme, the license file and the
python script to calculate the KPIs can be downloaded in separate files from
the same link or from this repository.
All PREPER data is made available under the Open Data Commons Attribution License ODC-By: http://opendatacommons.org/licenses/by/1.0/ and can be freely distributed also for commercial use as long as you attribute any public use of the database, or works produced from the database. For any use or redistribution of the database, or works produced from it, you must make clear to others the license of the database and keep intact any notices on the original database, provide a link to the license, indicate if changes were made, and give credit using the following citation:
Bakker, Jörg. PREPER dataset for safety evaluation of AI object perception systems, 2022. Asymptotic AB, https://github.com/AsymptoticAI/PREPER
For feedback, questions or if you like to provide benchmark results please contact jorg.bakker@asymptotic.ai.
This section contains links to some videos of scenarios and KPI annotations of the PREPER data. The video quality has been reduced compared to the original camera data in order to speed up viewing the files. Click on the preview image to watch the video.
 Rural straight road simulation
Rural straight road simulation
 Rural straight road test track
Rural straight road test track
 City crossing simulation
City crossing simulation
 City crossing test track
City crossing test track
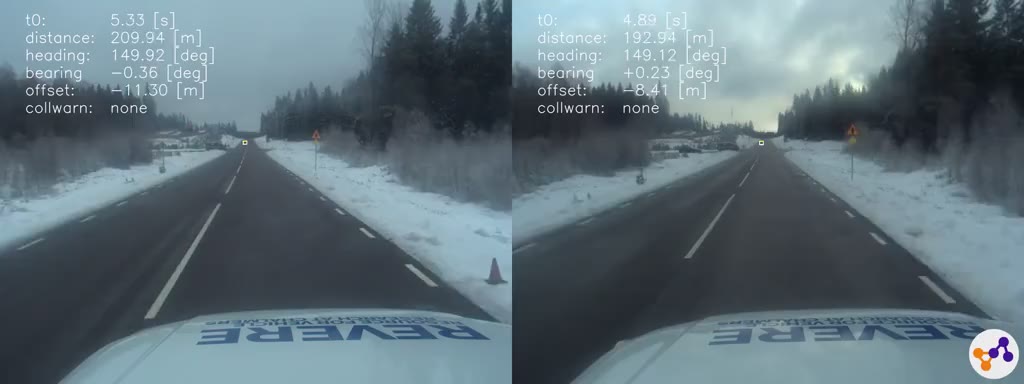 Rural straight annotated
Rural straight annotated
 Rural straight leader car annotated
Rural straight leader car annotated
 Rural curve left annotated
Rural curve left annotated
 City crossing annotated
City crossing annotated